Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
LE MOTEUR PAS A PAS

2
Principe

3
Moteur pas à pas Principe
Le moteur pas à pas tourne d’un angle constant chaque fois qu’il reçoit une impulsion au stator. La vitesse du moteur ne dépend donc que de la fréquence des impulsions reçues. L’angle de pas est de : - 90° pour un moteur pas/tour - 0,9° pour un moteur 400 pas/tour

4
Moteur à aimants permanents

5
Moteur pas à pas Moteurs à aimants permanents
Constitution Le stator est bobiné (électro-aimant) les polarités dépendent du sens du courant alimentant la bobine « phase » Utilisation impérativement du courant continu Le rotor comporte des aimants permanents pôles Nord et Sud successivement répartis.
 les polarités dépendent du sens du courant alimentant la bobine « phase » Utilisation impérativement. du courant continu. Le rotor comporte des aimants permanents pôles Nord et Sud successivement répartis.")
6
Moteur pas à pas Moteurs à aimants permanents
Fonctionnement Le rotor est bipolaire 1 pôle Nord 1 pôle Sud Phase P index A B S Le stator à 2 phases la phase P ( pôles A et C) la phase Q ( pôles B et D) N D C Phase Q
 la phase Q ( pôles B et D) N. D. C. Phase Q.")
7
Moteur pas à pas Moteurs à aimants permanents
Fonctionnement Alimentation du stator B A A B S U1 U2 P Q N C D C D K2 K1

8
Moteur pas à pas Moteurs à aimants permanents
B A D C S N U1 Fonctionnement K K2 - + - + K1 K2 A B C D Position + + N N S S 1

9
Moteur pas à pas Moteurs à aimants permanents
B A D C S N U1 U2 Fonctionnement K K2 - + - + K1 K2 A B C D Position + + N N S S 1 + S N N S 2 -

10
Moteur pas à pas Moteurs à aimants permanents
B A D C S N U2 Fonctionnement K K2 - + - + K1 K2 A B C D Position + + N N S S 1 + S N N S 2 - - S S N N 3 -

11
Moteur pas à pas Moteurs à aimants permanents
B A D C S N U2 U1 Fonctionnement K K2 - + - + K1 K2 A B C D Position + + N N S S 1 + S N N S 2 - N - S S N 3 - + - N S S N 4

12
Moteur pas à pas Moteurs à aimants permanents
B A D C S N U1 Fonctionnement K K2 - + - + K1 K2 A B C D Position + + N N S S 1 + S N N S 2 - - S S N N 3 - + - N S S N 4

13
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement Le sens de rotation du moteur dépend de l’ordre dans lequel on manœuvre les interrupteurs . K1 K2 A B C D Position Sens de progression + + N N S S 1 Sens Anti-horaire + S N N S 2 - - S S N N 3 - + - N S S N 4

14
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement Le sens de rotation du moteur dépend de l’ordre dans lequel on manœuvre les interrupteurs . K1 K2 A B C D Position Sens de progression + + N N S S 1 Sens Anti-horaire + S N N S 2 - - S S N N 3 - + - N S S N 4

15
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement Le sens de rotation du moteur dépend de l’ordre dans lequel on manœuvre les interrupteurs . K1 K2 A B C D Position Sens de progression + + N N S S 1 Sens Anti-horaire + S N N S 2 - - S S N N 3 - + - N S S N 4

16
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement Le sens de rotation du moteur dépend de l’ordre dans lequel on manœuvre les interrupteurs . K1 K2 A B C D Position Sens de progression + + N N S S 1 Sens Anti-horaire + S N N S 2 - - S S N N 3 - + - N S S N 4

17
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement Le sens de rotation du moteur dépend de l’ordre dans lequel on manœuvre les interrupteurs . K1 K2 A B C D Position Sens de progression + + N N S S 1 Sens Anti-horaire + S N N S 2 - - S S N N 3 - + - N S S N 4

18
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement Le sens de rotation du moteur dépend de l’ordre dans lequel on manœuvre les interrupteurs . K1 K2 A B C D Position Sens de progression + + N N S S 1 Sens Horaire + S N N S 2 - - S S N N 3 - + - N S S N 4

19
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement Le sens de rotation du moteur dépend de l’ordre dans lequel on manœuvre les interrupteurs . K1 K2 A B C D Position Sens de progression + + N N S S 1 Sens Horaire + S N N S 2 - - S S N N 3 - + - N S S N 4

20
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement Le sens de rotation du moteur dépend de l’ordre dans lequel on manœuvre les interrupteurs . K1 K2 A B C D Position Sens de progression + + N N S S 1 Sens Horaire + S N N S 2 - - S S N N 3 - + - N S S N 4

21
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement Le sens de rotation du moteur dépend de l’ordre dans lequel on manœuvre les interrupteurs . K1 K2 A B C D Position Sens de progression + + N N S S 1 Sens Horaire + S N N S 2 - - S S N N 3 - + - N S S N 4

22
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement Le sens de rotation du moteur dépend de l’ordre dans lequel on manœuvre les interrupteurs . K1 K2 A B C D Position Sens de progression + + N N S S 1 Sens Horaire + S N N S 2 - - S S N N 3 - + - N S S N 4

23
Moteur pas à pas Moteurs à aimants permanents
Fonctionnement Dans l’exemple de dessus l’angle de pas est de 90°. Le sens de rotation du moteur dépend de l’ordre dans lequel on manœuvre les interrupteurs. La vitesse de rotation du moteur dépend de la vitesse avec laquelle on manœuvre les interrupteurs. Ce type de moteur nécessite deux alimentations, on préfère diviser chaque phase en deux et réaliser ainsi un moteur quatre phases.

24
Moteur pas à pas Moteurs à aimants permanents
Fonctionnement Alimentation du stator position « G » A B N P Q P P’ Q Q’ U C D G D G D S K1 K2

25
Moteur pas à pas Moteurs à aimants permanents
Fonctionnement Alimentation du stator position « D » A B P Q U K1 K2 G D P’ Q’ S P’ Q’ C D G D N

26
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement K1 K2 Phases excitées A B C D Position U P Q G G P Q N N S S 1

27
Moteur pas à pas Moteurs à aimants permanents
B A D C S N B A D C S N Fonctionnement K1 K2 Phases excitées A B C D Position U Q P’ G G P Q N N S S 1 D G P’ Q S N N S 2

28
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement K1 K2 Phases excitées A B C D Position U Q’ P’ G G P Q N N S S 1 D G P’ Q S N N S 2 D D P’ Q’ S S N N 3

29
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement K1 K2 Phases excitées A B C D Position U P Q’ G G P Q N N S S 1 D G P’ Q S N N S 2 D D P’ Q’ S S N N 3 G D P Q’ N S S N 4

30
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement K1 K2 Phases excitées A B C D Position Q P G G P Q N N S S 1 D G P’ Q S N N S 2 U D D P’ Q’ S S N N 3 G D P Q’ N S S N 4

31
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement Le sens de rotation du moteur dépend de l’ordre dans lequel on manœuvre les interrupteurs . K1 K2 Phases excitées A B C D Position Sens de progression G G P Q N N S S 1 Sens Anti-horaire D G P’ Q S N N S 2 D D P’ Q’ S S N N 3 G D P Q’ N S S N 4

32
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement Le sens de rotation du moteur dépend de l’ordre dans lequel on manœuvre les interrupteurs . K1 K2 Phases excitées A B C D Position Sens de progression G G P Q N N S S 1 Sens Anti-horaire D G P’ Q S N N S 2 D D P’ Q’ S S N N 3 G D P Q’ N S S N 4

33
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement Le sens de rotation du moteur dépend de l’ordre dans lequel on manœuvre les interrupteurs . K1 K2 Phases excitées A B C D Position Sens de progression G G P Q N N S S 1 Sens Anti-horaire D G P’ Q S N N S 2 D D P’ Q’ S S N N 3 G D P Q’ N S S N 4

34
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement Le sens de rotation du moteur dépend de l’ordre dans lequel on manœuvre les interrupteurs . K1 K2 Phases excitées A B C D Position Sens de progression G G P Q N N S S 1 Sens Anti-horaire D G P’ Q S N N S 2 D D P’ Q’ S S N N 3 G D P Q’ N S S N 4

35
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement Le sens de rotation du moteur dépend de l’ordre dans lequel on manœuvre les interrupteurs . K1 K2 Phases excitées A B C D Position Sens de progression G G P Q N N S S 1 Sens Anti-horaire D G P’ Q S N N S 2 D D P’ Q’ S S N N 3 G D P Q’ N S S N 4

36
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement Le sens de rotation du moteur dépend de l’ordre dans lequel on manœuvre les interrupteurs . K1 K2 Phases excitées A B C D Position Sens de progression G G P Q N N S S 1 Sens Horaire D G P’ Q S N N S 2 D D P’ Q’ S S N N 3 G D P Q’ N S S N 4

37
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement Le sens de rotation du moteur dépend de l’ordre dans lequel on manœuvre les interrupteurs . K1 K2 Phases excitées A B C D Position Sens de progression G G P Q N N S S 1 Sens Horaire D G P’ Q S N N S 2 D D P’ Q’ S S N N 3 G D P Q’ N S S N 4

38
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement Le sens de rotation du moteur dépend de l’ordre dans lequel on manœuvre les interrupteurs . K1 K2 Phases excitées A B C D Position Sens de progression G G P Q N N S S 1 Sens Horaire D G P’ Q S N N S 2 D D P’ Q’ S S N N 3 G D P Q’ N S S N 4

39
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement Le sens de rotation du moteur dépend de l’ordre dans lequel on manœuvre les interrupteurs . K1 K2 Phases excitées A B C D Position Sens de progression G G P Q N N S S 1 Sens Horaire D G P’ Q S N N S 2 D D P’ Q’ S S N N 3 G D P Q’ N S S N 4

40
Moteur pas à pas Moteurs à aimants permanents
B A D C S N Fonctionnement Le sens de rotation du moteur dépend de l’ordre dans lequel on manœuvre les interrupteurs . K1 K2 Phases excitées A B C D Position Sens de progression G G P Q N N S S 1 Sens Horaire D G P’ Q S N N S 2 D D P’ Q’ S S N N 3 G D P Q’ N S S N 4

41
Moteur pas à pas Moteurs à aimants permanents
Fonctionnement Dans l’exemple de dessus l’angle de pas est de 90°. Le sens de rotation du moteur dépend de l’ordre dans lequel on manœuvre les interrupteurs. La vitesse de rotation du moteur dépend de la vitesse avec laquelle on manœuvre les interrupteurs.

42
Moteur pas à pas Moteurs à aimants permanents
Caractéristiques Inertie du rotor élevée (aimants permanents). Variation des performances liée au vieillissement des aimants. L’alimentation des phases sans commutation de l’électronique produit un couple de maintien.
. Variation des performances liée au vieillissement des aimants. L’alimentation des phases sans commutation de l’électronique. produit un couple de maintien.")
43
Moteur à réluctance variable

44
Moteur pas à pas Moteurs à réluctance variable
Constitution Le stator est bobiné (électro-aimant) les polarités dépendent du sens du courant alimentant la bobine « phase » Les pôles en fer doux feuilleté du rotor sont attirés par le champ magnétique créé par les bobines du stator, cette attraction a pour effet de diminuer l'entrefer pour faciliter le passage du flux magnétique de la bobine en diminuant la réluctance du circuit magnétique. Utilisation d’un courant CC ou AC entrefer réduit au maximum 0,05 mm
 les polarités dépendent du sens du courant. alimentant la bobine « phase » Les pôles en fer doux feuilleté du rotor sont attirés par le champ magnétique créé par les bobines du stator, cette attraction a pour effet de diminuer l entrefer pour faciliter le passage du flux magnétique de la bobine en diminuant. la réluctance du circuit magnétique. Utilisation d’un courant CC ou AC. entrefer réduit au maximum 0,05 mm.")
45
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement L’angle de pas a est ici a = a s - a r angle du stator a s = 360 / Ns angle du rotor a r = 360 / Nr A E H F il faut que Nr = Ns + 1 a = 360 (Nr-Ns) / Nr.Ns _ G B C a = / Ns ( Ns + 1)
 / Nr.Ns. _. G. B. C. a = / Ns ( Ns + 1)")
46
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A=1 On alimente la phase A, le pôle E se positionne pour obtenir un entrefer minimum. Le pôle E sera la référence pour la suite. E H F G B C

47
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A On alimente la phase B, le pôle F se positionne pour obtenir un entrefer minimum. Rotation de + 30°. E H F G B=1 C

48
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A On alimente la phase C, le pôle G se positionne pour obtenir un entrefer minimum. Rotation de + 30°. H E G F B C=1

49
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A=1 On alimente la phase A, le pôle H se positionne pour obtenir un entrefer minimum. Rotation de + 30°. H G E F B C

50
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A On alimente la phase B, le pôle E se positionne pour obtenir un entrefer minimum. Rotation de + 30°. H G E F B=1 C

51
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A On alimente la phase C, le pôle F se positionne pour obtenir un entrefer minimum. Rotation de + 30°. G H F E B C=1

52
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A=1 On alimente la phase A, le pôle G se positionne pour obtenir un entrefer minimum. Rotation de + 30°. G F H E B C

53
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A On alimente la phase B, le pôle H se positionne pour obtenir un entrefer minimum. Rotation de + 30°. G F H E B=1 C

54
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A On alimente la phase C, le pôle E se positionne pour obtenir un entrefer minimum. Rotation de + 30°. F G E H B C=1

55
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A=1 On alimente la phase A, le pôle F se positionne pour obtenir un entrefer minimum. Rotation de + 30°. F E G H B C

56
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A On alimente la phase B, le pôle G se positionne pour obtenir un entrefer minimum. Rotation de + 30°. F E G H B=1 C

57
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A On alimente la phase C, le pôle H se positionne pour obtenir un entrefer minimum. Rotation de + 30°. E F H G B C=1

58
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A=1 On alimente la phase A, le pôle E se positionne pour obtenir un entrefer minimum. Rotation de + 30°. E H F G B C

59
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A=1 Si on alimente les phases dans l’ordre A-B-C-A-B-C ..etc… le moteur tourne dans le sens horaire avec un pas de + 30°. Il faut 12 pas pour faire un tour. Si on alimente les phases dans l’ordre A-C-B-A-C-B ..etc… le moteur tourne dans le sens anti- horaire avec un pas de - 30°. Il faudra aussi 12 pas pour faire un tour. E H F G B C

60
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A On alimente la phase C, le pôle H se positionne pour obtenir un entrefer minimum. Rotation de - 30°. E F H G B C=1

61
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A On alimente la phase B, le pôle G se positionne pour obtenir un entrefer minimum. Rotation de - 30°. F E G H B=1 C

62
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A=1 On alimente la phase A, le pôle F se positionne pour obtenir un entrefer minimum. Rotation de - 30°. F E G H B C

63
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A On alimente la phase C, le pôle E se positionne pour obtenir un entrefer minimum. Rotation de - 30°. F G E H B C=1

64
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A On alimente la phase B, le pôle H se positionne pour obtenir un entrefer minimum. Rotation de - 30°. G F H E B=1 C

65
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A=1 On alimente la phase A, le pôle G se positionne pour obtenir un entrefer minimum. Rotation de - 30°. G F H E B C

66
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A On alimente la phase C, le pôle F se positionne pour obtenir un entrefer minimum. Rotation de - 30°. G H F E B C=1

67
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A On alimente la phase B, le pôle E se positionne pour obtenir un entrefer minimum. Rotation de - 30°. H G E F B=1 C

68
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A=1 On alimente la phase A, le pôle H se positionne pour obtenir un entrefer minimum. Rotation de - 30°. H G E F B C

69
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A On alimente la phase C, le pôle G se positionne pour obtenir un entrefer minimum. Rotation de - 30°. H E G F B C=1

70
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A On alimente la phase B, le pôle F se positionne pour obtenir un entrefer minimum. Rotation de - 30°. E H F G B=1 C

71
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement A=1 On alimente la phase A, le pôle E se positionne pour obtenir un entrefer minimum. Rotation de - 30°. E H F G B C

72
Moteur pas à pas Moteurs à réluctance variable
Fonctionnement Dans l’exemple de dessus l’angle de pas est de 30°. Le sens de rotation du moteur dépend de l’ordre dans lequel on manœuvre les interrupteurs. La vitesse de rotation du moteur dépend de la vitesse avec laquelle on manœuvre les interrupteurs.

73
Moteur pas à pas Moteurs à réluctance variable
Caractéristiques Inertie du rotor faible (rotors creux). Angle de pas petits. Pas de couple résiduel. Risque de rentrer en résonance à certaines vitesses .
. Angle de pas petits. Pas de couple résiduel. Risque de rentrer en résonance à certaines vitesses .")
74
Moteur hybride

75
Moteur pas à pas Moteurs hybrides
Fonctionnement Ils utilisent simultanément les principes des moteurs à aimants permanents et à réluctance variable, afin d’obtenir un plus grand couple moteur. On arrive à des pas angulaires faibles 1,8° avec un rapport couple inertie très élevé. L’aimant permanent au rotor améliore le couple moteur ainsi que le couple de maintien.

76
Caractéristiques d’un moteur pas à pas

77
Moteur pas à pas Caractéristiques d’un moteur pas à pas
Mécaniques - Encombrement. - Masse. - Inertie du rotor. - Angle de pas. Electriques - Caractéristique couple / fréquence. - Résistance d’une phase. - Intensité par phase. - Tension d’isolement. - Température stockage / fonctionnement.

78
Moteur pas à pas Caractéristiques d’un moteur pas à pas
Caractéristique Couple / Fréquence. C’est la plus importante pour le choix d’un moteur pas à pas. Couple (Nm) Fréquence (pas/seconde) B B couple au démarrage Zone de décrochage A A couple à l’entraînement limite «couple maximum» Zone de démarrage D Fréquence maximum d’entraînement à vide Fréquence maximum de démarrage à vide
 Fréquence (pas/seconde) B. B couple au démarrage. Zone de décrochage. A. A couple à l’entraînement. limite «couple maximum» Zone de démarrage. D. Fréquence maximum d’entraînement à vide. Fréquence maximum de démarrage à vide.")
79
Moteur pas à pas Caractéristiques d’un moteur pas à pas
Caractéristique Couple / Fréquence. Couple (Nm) Fréquence (pas/seconde) Zone de décrochage A B Zone de démarrage D Quand on est amené à travailler dans cette zone il est nécessaire de prévoir : - une rampe d’accélération pour démarrer dans la zone D. - une rampe de décélération pour revenir en zone D avant de s’arrêter. Si ces deux conditions sont remplies on ne perd aucun pas !
 Fréquence (pas/seconde) Zone de décrochage. A. B. Zone de démarrage. D. Quand on est amené à travailler dans cette zone il est nécessaire de prévoir : - une rampe d’accélération pour démarrer dans la zone D. - une rampe de décélération pour revenir en zone D avant de s’arrêter. Si ces deux conditions sont remplies on ne perd aucun pas !")
80
Moteur pas à pas Caractéristiques d’un moteur pas à pas
Fréquence (pas/seconde) B A Couple (Nm) Caractéristique Couple / Fréquence. Si on est en charge: - la courbe A n’est pas modifiée. - l’inertie extérieure JE due à la charge modifie la courbe d’arrêt démarrage B. JT = JR JE inertie inertie du rotor inertie totale du moteur extérieure
 B. A. Couple (Nm) Caractéristique Couple / Fréquence. Si on est en charge: - la courbe A n’est pas modifiée. - l’inertie extérieure JE due à la charge modifie la courbe d’arrêt démarrage B. JT = JR + JE. inertie inertie du rotor inertie. totale du moteur extérieure.")
81
Moteur pas à pas Caractéristiques d’un moteur pas à pas
Caractéristique Couple / Fréquence. A vide Couple (Nm) JE0 JE0 = 0 JT = JR moteur seul Zone de décrochage A B Zone de démarrage D Fréquence (pas/seconde) Fréquence maximum d’entraînement à vide Fréquence maximum de démarrage à vide
 JE0. JE0 = 0. JT = JR moteur seul. Zone de décrochage. A. B. Zone de démarrage. D. Fréquence (pas/seconde) Fréquence maximum d’entraînement à vide. Fréquence maximum de démarrage à vide.")
82
Moteur pas à pas Caractéristiques d’un moteur pas à pas
Caractéristique Couple / Fréquence. En charge Couple (Nm) Fréquence maximum de démarrage charge1 JE1 B’ JE1 = JR JT = JR + charge1 = 2 JR Zone de décrochage A B Zone de démarrage D Fréquence (pas/seconde) JE0 Fréquence maximum d’entraînement à vide
 Fréquence maximum de démarrage charge1. JE1. B’ JE1 = JR. JT = JR + charge1 = 2 JR. Zone de décrochage. A. B. Zone de démarrage. D. Fréquence (pas/seconde) JE0. Fréquence maximum d’entraînement à vide.")
83
Moteur pas à pas Caractéristiques d’un moteur pas à pas
Caractéristique Couple / Fréquence. En charge Couple (Nm) Fréquence maximum de démarrage charge 2 B’’ JE2 JE2 = 2JR JT = JR + charge2 = 3 JR Zone de décrochage A B’ Zone de démarrage D B Fréquence (pas/seconde) JE1 JE0 Fréquence maximum d’entraînement à vide
 Fréquence maximum de démarrage charge 2. B’’ JE2. JE2 = 2JR. JT = JR + charge2 = 3 JR. Zone de décrochage. A. B’ Zone de. démarrage. D. B. Fréquence (pas/seconde) JE1. JE0. Fréquence maximum d’entraînement à vide.")
84
Moteur pas à pas Caractéristiques d’un moteur pas à pas
Caractéristique Couple / Fréquence. En charge La fréquence maximum de démarrage décroît quand la charge augmente. Couple (Nm) Fréquence (pas/seconde) JE0 Zone de décrochage Zone de démarrage D JE1 A B B’ B’’ JE2 Le réseau de courbes ci-contre correspond à l’ensemble « moteur + électronique de commande ». La commande utilisée influence fortement le réseau !
 Fréquence (pas/seconde) JE0. Zone de décrochage. Zone de. démarrage. D. JE1. A. B. B’ B’’ JE2. Le réseau de courbes ci-contre correspond à l’ensemble « moteur + électronique de commande ». La commande utilisée influence fortement le réseau !")
85
Critères de qualité des unités de commande

86
Moteur pas à pas Critères de qualité des unités de commande
P (w) = C (Nm) p . n(tr/s) Pour obtenir une puissance maximum il faut avoir simultanément : Le Couple (donc le courant parcourant les phases) très élevé. La limite pour le couple maximum est la saturation des masses métalliques, c’est une caractéristique fixée à la construction. Le couple maximum (donc le courant maximum dans les bobinages) sera atteint plus ou moins rapidement en fonction des possibilités de la commande. La vitesse (donc la fréquence des commutations) très élevée. La fréquence maximum de commutation est fonction des caractéristiques des bobinages du moteur et des composants de puissance utilisés.
 = C (Nm) p . n(tr/s) Pour obtenir une puissance maximum il faut avoir simultanément : Le Couple (donc le courant parcourant les phases) très élevé. La limite pour le couple maximum est la saturation des masses métalliques, c’est une. caractéristique fixée à la construction. Le couple maximum (donc le courant maximum dans les bobinages) sera atteint plus ou moins rapidement en fonction des possibilités de la commande. La vitesse (donc la fréquence des commutations) très élevée. La fréquence maximum de commutation est fonction des caractéristiques des bobinages du. moteur et des composants de puissance utilisés.")
87
Moteur pas à pas Critères de qualité des unités de commande
P (w) = C (Nm) p . N(tr/s) Une unité de commande est d’autant plus intéressante : - Quelle permet de conserver la valeur maximale du couple sur une plage de vitesse importante. - Que l’ensemble qu’elle forme avec le moteur pas à pas présente un rendement élevé.
 = C (Nm) p . N(tr/s) Une unité de commande est d’autant plus intéressante : - Quelle permet de conserver la valeur maximale du couple sur une plage de vitesse importante. - Que l’ensemble qu’elle forme avec le moteur pas à pas présente un rendement élevé.")
88
Moteur pas à pas Critères de qualité des unités de commande
Lm Rm Em I v = U alim + P’ Ualim T1 T2 _ Branchement de deux phases Schéma électrique d’une phase

89
Moteur pas à pas Critères de qualité des unités de commande
Alimentation directe d’une phase. Au moment de la mise sous tension d’un enroulement, le courant prend un certain temps pour s’établir à une valeur voulue. t = Lm / Rm constante de temps électrique v Ualim t I Quand la vitesse augmente, à cause du temps d’établissement du courant, la valeur moyenne du courant circulant pendant l’alimentation d’une phase diminue. Le couple procuré par le moteur diminue lui aussi. t Ualim / Rm t On à donc intérêt à réduire le temps de monté du courant au minimum, c’est le rôle de l’unité de commande.

90
Moteur pas à pas Critères de qualité des unités de commande
Alimentation directe d’une phase. v Ualim Au moment de la coupure du courant dans l’enroulement, l’inductance génère une tension inverse dangereuse pour les transistors du circuit de commutation « transistor de puissance ». t I t Ualim / Rm t On protégera l’électronique de puissance par diode de roue libre ou par condensateur.

91
Moteur pas à pas Critères de qualité des unités de commande
Alimentation par résistance série. On travaille avec une tension double et une résistance série telle que R = R m. v Lm Rm Em R 2 Ualim t v = 2 U alim I 2 Ualim 2 Rm t ’ = Lm / 2Rm = t /2 Le courant augmente deux fois plus vite donc possibilité de travailler à des fréquences doubles. t On consomme de la puissance pour rien dans la résistance extérieure R. Les constructeurs vont jusque à R = 3 R m

92
Moteur pas à pas Critères de qualité des unités de commande
Alimentation à deux niveaux de tension. On utilise une commande bipolaire à deux niveaux à régulation de courant par transistor ballast. + haute tension « 2U alim » K2 = K5 = 1 K3 = K4 = 0 S N K2 = K5 = 0 K3 = K4 = 1 N S K1 + basse tension « U alim » K2 K3 K1 est le transistor ballast K4 K5 R exploration Image du courant

93
Moteur pas à pas Critères de qualité des unités de commande
Alimentation à deux niveau de tension. On utilise une commande bipolaire à deux niveaux à régulation de courant ar transistor ballast. v K1 + haute tension « 2U alim » 2 Ualim Ualim t K2 K3 I t = Lm / Rm K4 K5 2Ualim / Rm Image du courant R exploration Ualim / Rm t 1er temps, on alimente avec la plus haute tension « 2 U alim » jusqu'à ce que le courant dans la phase atteigne la valeur nominale IN = Ualim / Rm

94
Moteur pas à pas Critères de qualité des unités de commande
Alimentation à deux niveau de tension. On utilise une commande bipolaire à deux niveaux à régulation de courant ar transistor ballast. v K1 2 Ualim Ualim + basse tension « U alim » t K2 K3 I t = Lm / Rm K4 K5 2Ualim / Rm Image du courant R exploration Ualim / Rm t 2em temps, dès que le courant dans la phase atteint la valeur nominale IN = Ualim / Rm on alimente avec la plus basse tension « U alim ».

95
Moteur pas à pas Critères de qualité des unités de commande
Alimentation par pont complet. On utilise un pont complet à transistors avec : - les transistors T1 et T2 travaillant en hacheur. - les transistors T 3 et T4 permettent la commutation du courant dans le sens requis. T1 T3 T2 Alim T4 mesure

96
Moteur pas à pas Critères de qualité des unités de commande
Alimentation par pont complet. 1 er temps, on alimente la phase jusqu’à ce que le courant atteigne In + 10%. Courant dans le bobinage + T1 T2 Alim T3 T4 t Rex mesure S N T1 et T4 saturés T2 et T3 bloqués

97
Moteur pas à pas Critères de qualité des unités de commande
Alimentation par pont complet. 2 em temps, on coupe l’alimentation de la phase, jusqu’à ce que le courant atteigne In -10%. Courant dans le bobinage + T1 T2 Alim T3 T4 t Rex mesure S N T4 saturé T1 , T2 et T3 bloqués

98
Moteur pas à pas Critères de qualité des unités de commande
Alimentation par pont complet. 3 em temps, on alimente la phase jusqu’à ce que le courant atteigne In + 10%. Courant dans le bobinage + T1 T2 Alim T3 T4 t Rex mesure S N T1 et T4 saturés T2 et T3 bloqués

99
Moteur pas à pas Critères de qualité des unités de commande
Alimentation par pont complet. 4 em temps, on coupe l’alimentation de la phase, jusqu’à ce que le courant atteigne In -10%. Courant dans le bobinage + T1 T2 Alim T3 T4 t Rex mesure S N T4 saturé T1 , T2 et T3 bloqués etc……..

100
Moteur pas à pas Critères de qualité des unités de commande
Alimentation par pont complet. 1 er temps, on alimente la phase jusqu’à ce que le courant atteigne In + 10%. T1 T2 t Alim T3 T4 Courant dans le bobinage - Rex mesure N S T2 et T3 saturés T1 et T4 bloqués

101
Moteur pas à pas Critères de qualité des unités de commande
Alimentation par pont complet. 2 em temps, on coupe l’alimentation de la phase, jusqu’à ce que le courant atteigne In -10%. T1 T2 t Alim T3 T4 Courant dans le bobinage - Rex mesure N S T3 saturé T1 , T2 et T4 bloqués

102
Moteur pas à pas Critères de qualité des unités de commande
Alimentation par pont complet. 3 em temps, on alimente la phase jusqu’à ce que le courant atteigne In + 10%. T1 T2 t Alim T3 T4 Courant dans le bobinage - Rex mesure N S T2 et T3 saturés T1 et T4 bloqués

103
Moteur pas à pas Critères de qualité des unités de commande
Alimentation par pont complet. 4 em temps, on coupe l’alimentation de la phase, jusqu’à ce que le courant atteigne In -10%. T1 T2 t Alim T3 T4 Courant dans le bobinage - Rex mesure N S T3 saturé T1 , T2 et T4 bloqués etc……..

104
Moteur pas à pas Critères de qualité des unités de commande
Alimentation par pont complet. Le moteur et l’alimentation présentent un bon rendement. En effet dès que le courant atteint un seuil supérieur à I + 10%, l’énergie emmagasinée par l’inductance du moteur est mise à profit pour faire circuler le courant dans le bobinage. L’alimentation est coupée tant que l’on a I > (I - 10%). T1 T3 T2 Alim T4 mesure
. T1. T3. T2. Alim. T4. mesure.")
105
Comparaison entre les différents types de moteurs pas à pas

106
Moteur pas à pas Comparaison entre les différents types de moteurs pas à pas

107
Moteur pas à pas Comparaison entre les différents types de moteurs pas à pas
Les systèmes d’entraînement avec moteurs pas à pas permettent un positionnement exact en boucle ouverte (sans signal de retour), par un nombre défini d’impulsions de commande. Ils peuvent utiliser des signaux qui sont issus de systèmes de commande numérique. - Couple moteur élevé pour des vitesses angulaires faibles même en fonctionnement en pas à pas. - Couple de maintien important quand le moteur est excité au repos qui provoque l’arrêt. f maximum Khz C maximum 18 Nm
, par un nombre défini d’impulsions de commande. Ils peuvent utiliser des signaux qui sont issus de systèmes de commande numérique. - Couple moteur élevé pour des vitesses angulaires faibles même en fonctionnement. en pas à pas. - Couple de maintien important quand le moteur est excité au repos qui provoque. l’arrêt. f maximum 100 Khz. C maximum 18 Nm.")
108
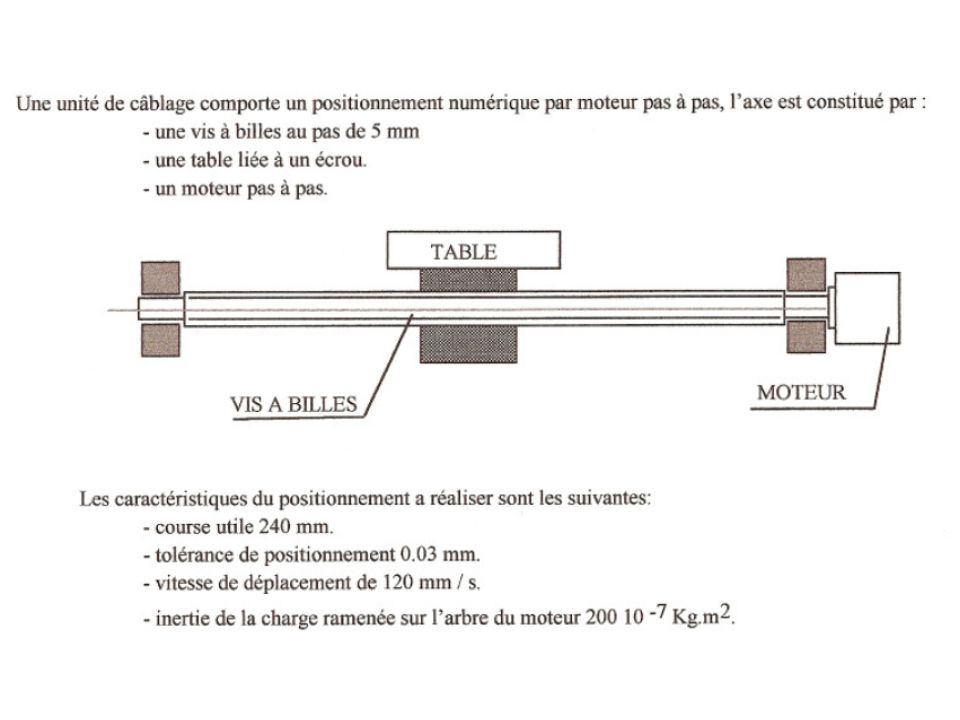
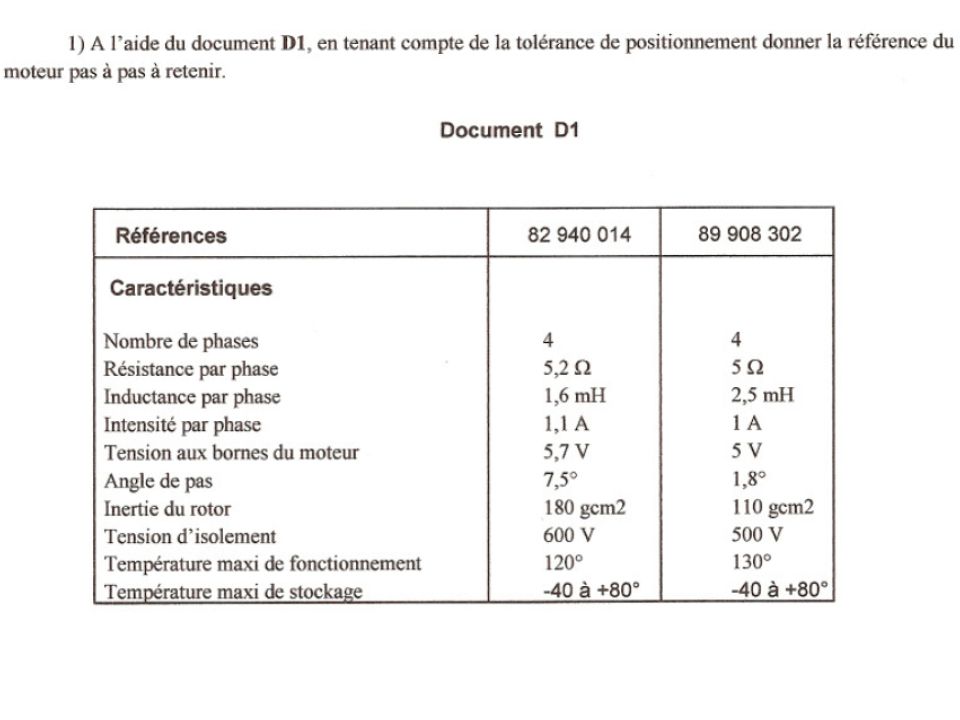
Moteur pas à pas EXERCICE

113
1 tour moteur = 1 tour de la vis = 5mm
Détermination de l’angle de pas que doit avoir le moteur retenu 1 tour moteur = 1 tour de la vis = 5mm Nombre de pas pour 1 tour = 5/0,003 = 166,66 Tolérance de positionnement 00,3 mm Angle de pas du moteur = 360 / 166,66 = 2,16° MAXI

114
Angle de pas du moteur = 2,16° MAXI

115
OK Nombre de pas pour faire 1 tour = 360/1,8 = 200
Précision de positionnement obtenue = 5/200 = 0,025 mm

116
Vérification que dynamiquement le moteur peut assurer un axe bien réactif (dur)
J MAXI de la charge ramenée au moteur = 2 J Rmoteur = 220 gcm2 OK Ici J charge ramenée au moteur = kgm2 = gm2 = 200 gcm2

117
Vitesse de déplacement 120 mm/s
Pas de la vis 5 mm Vitesse du moteur = 120 / 5 = 24 tr/s Vitesse du moteur 24 tr/s Angle de pas 1,8° (200 pas/tr) Vitesse du moteur = = 4800 pas/s Vitesse de commutation de l’électronique = vitesse du moteur /2 Vitesse de commutation de l’électronique = 4800 /2 = 2400 commutation/s = 2,4 Khz T = 0,42 ms
 Vitesse du moteur = = 4800 pas/s. Vitesse de commutation de l’électronique = vitesse du moteur /2. Vitesse de commutation de l’électronique = 4800 /2 = 2400 commutation/s = 2,4 Khz. T = 0,42 ms.")
118
Problème T1 = 0,21 ms T0 = 0,21 ms Il faut que < 0,21 ms
= Lm / Rm = 2, / 5 = 0,5 ms Problème

119
Pour fournir le couple nominal sur toute la plage de vitesse, il faut diminuer en rajoutant
une résistance série. ’ = Lm / (Rm + R) < 0,07 ms R > (Lm – Rm ) / 0, R > (2, – ) / 0, R > 30,72 W On va retenir R = 31 W OK ’ = Lm / (Rm + R) = 2, / (5 + 31) = 0,069 ms < 0,07 ms
 < 0,07 ms. R > (Lm – Rm ) / 0, R > (2, – ) / 0, R > 30,72 W. On va retenir R = 31 W. OK. ’ = Lm / (Rm + R) = 2, / (5 + 31) = 0,069 ms < 0,07 ms.")
120
PR = R . I2 = = 31 W On va retenir une résistance R de 31 W et de 31W

121
5W 1 A 31W Vcc = ,7 = 36,7 V

122
OK Vcc = ,7 = 36,7 V

123
Fin

Présentations similaires














>")






