Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
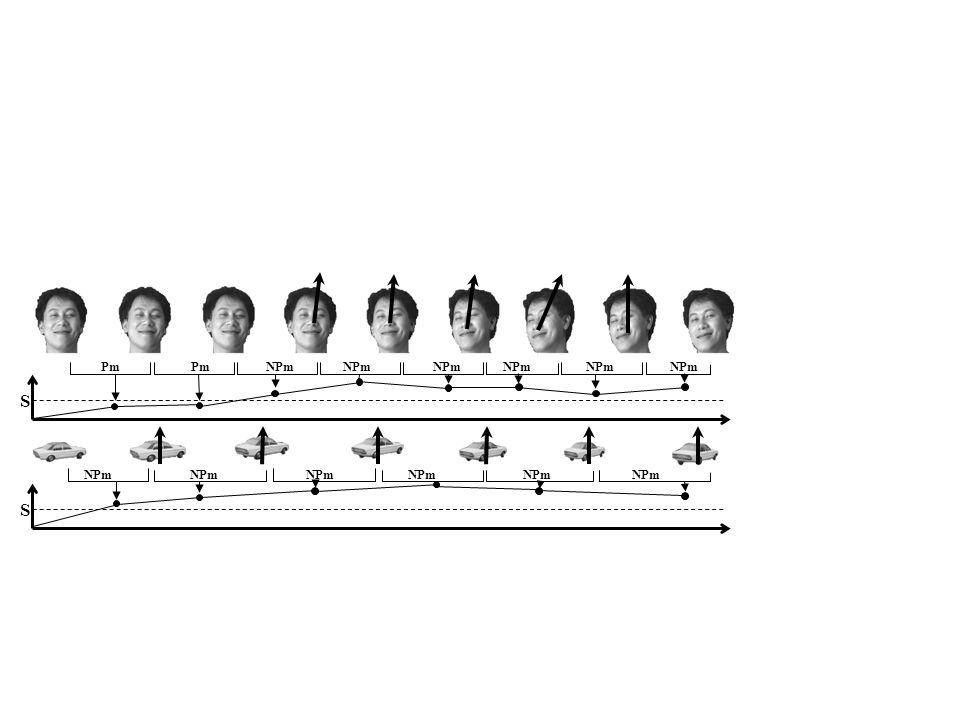
Pm 1 Detection and Analysis of the orientation variation Pm = Planar movementsNPm = Non-planar movements Pm1NPm1Pm2NPm2Pm3 Video object Trajectory Pm3 mP5 Pm2 NPm2NPm3 Pm4 NPm4NPm1 Fig.1. Decomposition of a video object trajectory

2
Planar motion analysis Quality Criteria Occlusion zone Non -Planar motion analysis Valid planar motion model Invalid Planar motion model Estimation of the rotation axis of a non-planar motion Estimation of the angle rotation of a non-planar motion Translation estimation Rotation estimation Mapping quality evaluation - Original VOP ’s - VOP ’s masks Divergence estimation Fig.2. General outline of the proposed approach

3
Estimation de la divergence þ Le changement d’échelle peut être déterminé par l'équation suivante. þ Modèle de divergence (appliqué entre les VOP1 et VOP2) x g, y g centre de gravité x, y VOP S= surface d’un VOP
 x g, y g centre de gravité x, y VOP S= surface d’un VOP.")
4
Image d’erreur (cgx 1,cgy 1 ) (cgx 2,cgy 2 ) VOP Référence Tx = cgx 1 -cgx 2 Ty = cgy 1 -cgy 2 VOP’ Σ VOP-26VOP-22 Centres de gravité des VOPs
 (cgx 2,cgy 2 ) VOP Référence Tx = cgx 1 -cgx 2 Ty = cgy 1 -cgy 2 VOP’ Σ VOP-26VOP-22 Centres de gravité des VOPs")
5
Image d’erreur VOP-26 VOP’’ VOP’ Σ Surfaces des VOPs: S 2 >S 1

6
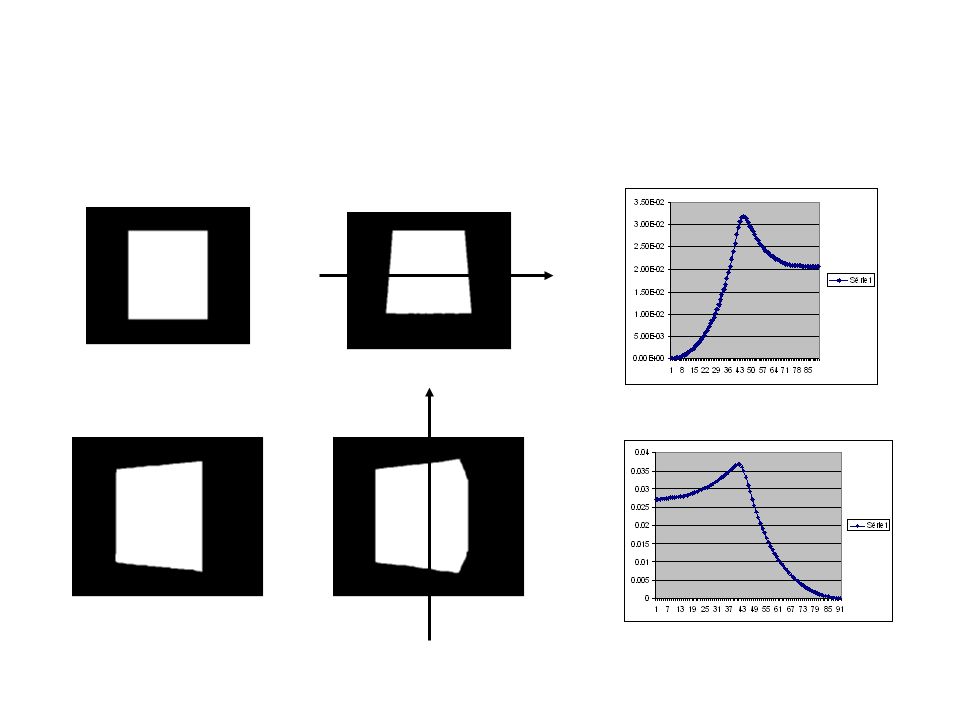
distance max VOP1 VOP2 Φ droites tangentes droites tangentes Estimation de la rotation

7
VOP-26 Φ VOP’’’ Image d’erreur VOP-26VOP’’ Σ Image d’erreur

8
1er Critère: Evaluation de la qualité de la mise en correspondance Pourcentage des pixels non compensés 2e Critère: 3e Critère: 4e Critère: Modification du calcul de l ’EQM

9
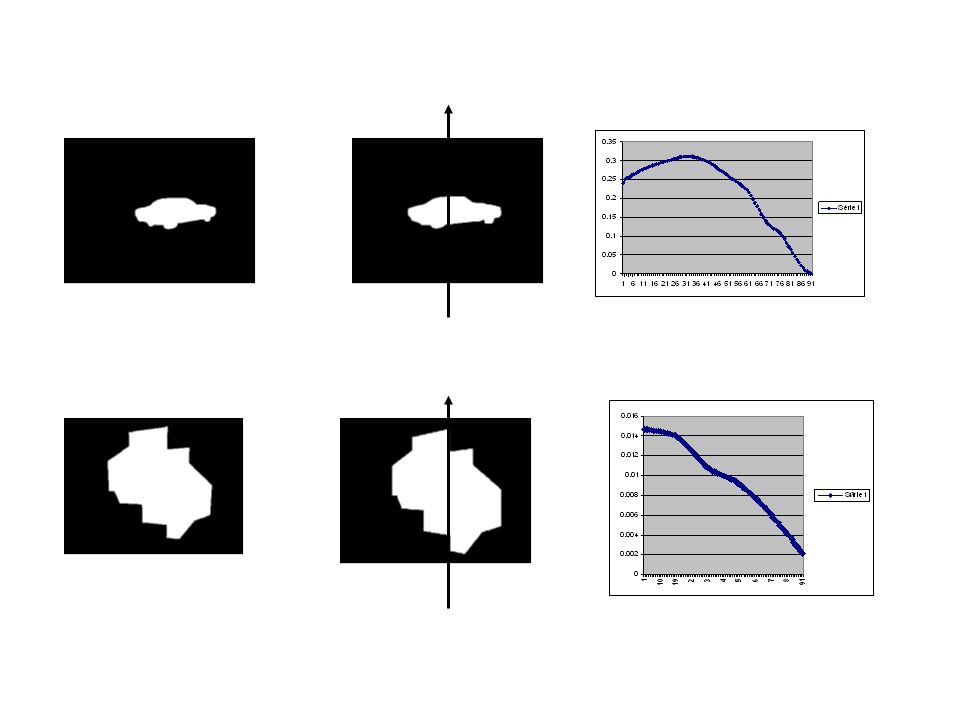
(cgx 1,cgy 1 ) VOP-22 VOP Référence VOP-27 Estimation du mouvement Non-Plan a) Estimation de l ’axe de rotation b) Estimation de l ’angle de rotation VOP-26
 VOP-22 VOP Référence VOP-27 Estimation du mouvement Non-Plan a) Estimation de l ’axe de rotation b) Estimation de l ’angle de rotation VOP-26")
10
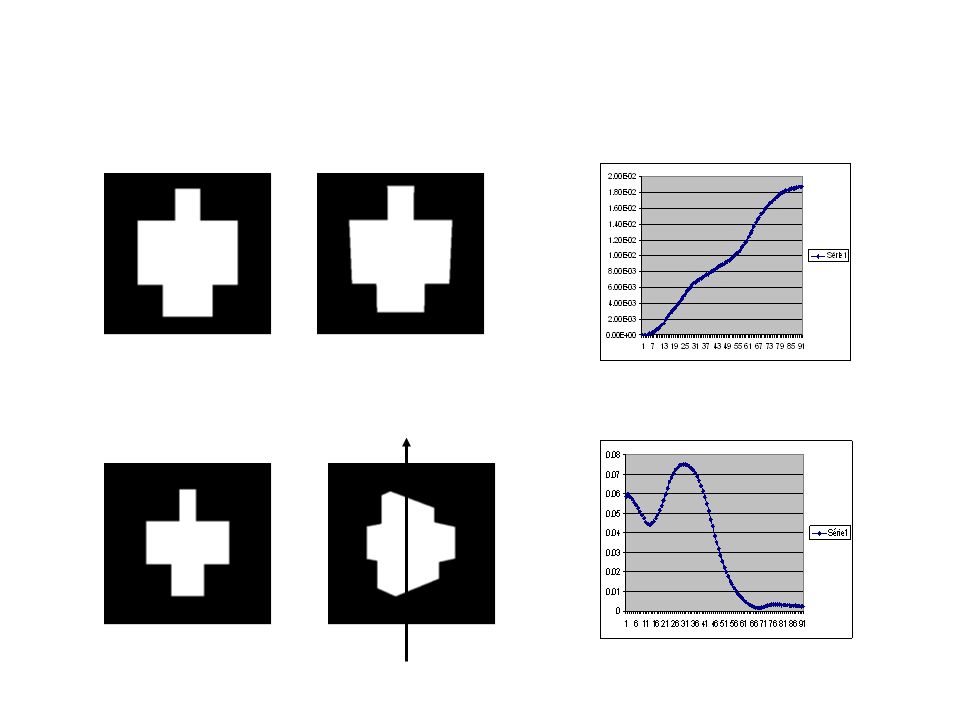
Y A’ B’ X Y A’ B’ X Y X Y A B A’ B’ Estimation de la direction de l ’axe de rotation

11
A1 A2 X A1’ A2’ cg VOP t VOP t+n X Y X P1+P1+ P1-P1- D Y X P2+P2+ P2-P2- D VOP t VOP t+n

15
PmNPm kI 1 kI 5 kI 9 kI 11 kI 14 kI 15 kI 17 kI 19 kI 20 kI 4 kI 22 Pm NPm Pm

17
NPm S PmNPm S S PmNPmPmNPm S Pm NPm A) C) E) G) B) D) F) H)
 C) E) G) B) D) F) H)")
Présentations similaires











.>")







