Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Robot d’investigation
Seconde MPS Robot d’investigation Année

2
FP1 : se déplacer sur le sol avec énergie électrique embarquée.
Objectif : Parcourir une distance (2 mètres) le plus rapidement possible. énergie électrique FC5 Sol FP1 FC1 FC2 Robot FC3 FC4 Utilisateur FP1 : se déplacer sur le sol avec énergie électrique embarquée. Fc1 : adhérer au sol. Fc2 : être stable au sol. Fc3 : être esthétique. Fc4 : permettre la commande M/A. Fc5 : être autonome énergiquement.
 le plus rapidement possible. énergie. électrique. FC5. Sol. FP1. FC1. FC2. Robot. FC3. FC4. Utilisateur. FP1 : se déplacer sur le sol avec énergie électrique embarquée. Fc1 : adhérer au sol. Fc2 : être stable au sol. Fc3 : être esthétique. Fc4 : permettre la commande M/A. Fc5 : être autonome énergiquement.")
3
Groupes : par groupes de 4 suivant les îlots constitués.
Les challenges : Temps le plus court pour parcourir la distance / 80 pts Roue(s) la (les) plus design / 40 pts Robot le plus esthétique / 40 pts Robot le plus léger / 40 pts Total / 200 pts
 la (les) plus design / 40 pts. Robot le plus esthétique / 40 pts. Robot le plus léger / 40 pts. Total / 200 pts.")
4
Travail attendu : Choix du réducteur. Design de la (les) roue(s) Dessin Solidworks de la (les) roue(s). Design du châssis du robot Dessin Solidworks du robot. (pièces et assemblages). Choix du câblage électrique (schéma). Réalisation des pièces et prototypage
. Choix du câblage électrique (schéma). Réalisation des pièces et prototypage.")
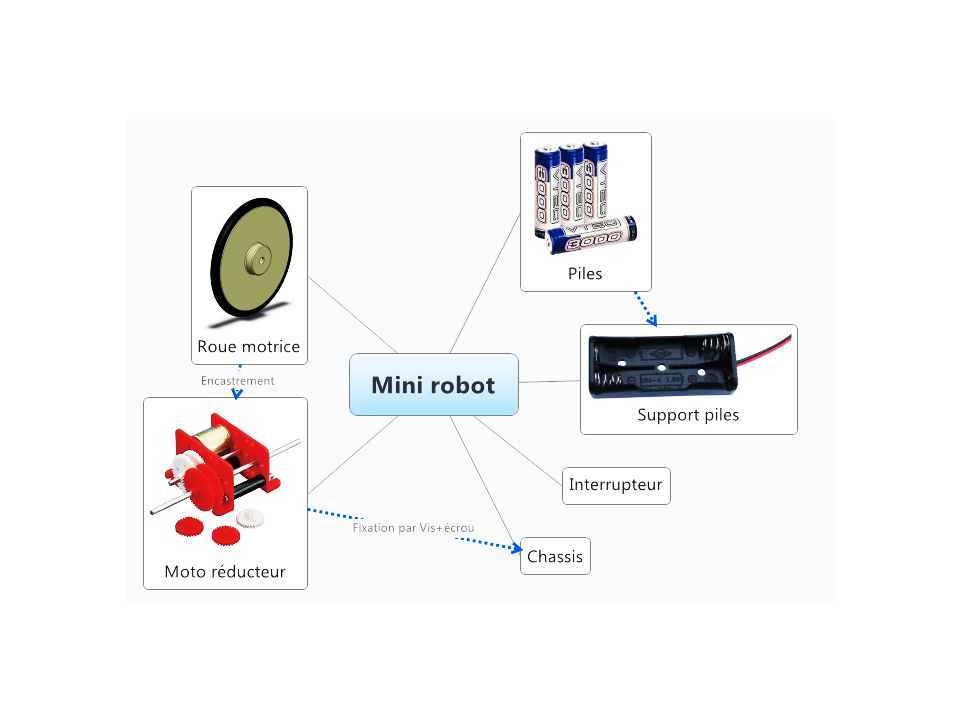
5
FP1 : se déplacer sur le sol avec utiliser le moto réducteur Conrad fourni. REF 240788-62
énergie électrique embarquée. châssis en PVC 6 mm. axe de transmission en diamètre 3 mm, lg 100 ou 120 mm roues et supports à dessiner et fabriquer en prototypage dimensions maxi : L 120 X l 120 X h 60 Fc1 : adhérer au sol Distance à parcourir 2m Fc2 : être stable au sol points d’appuis minimum. Fc3 : être esthétique Les roues doivent être design. Fc4 : permettre la commande M/A Utiliser un interrupteur. Fc5 : être autonome énergiquement. Utiliser 2 piles LR6 AA avec boîtier.

Présentations similaires













>")





