Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Chapitre 11 : Mouvements (cinématique) et première loi de Newton.
y (m) x (m) 1 5 M1 M2 M0 M3 M4 2 m.s - 1 50 m.s 2 y (m) x (m) -0,4 -0,3 -0,2 -0,1 0,1 0,2 0,3 0,4
 x (m) M1. M2. M0. M3. M4. 2 m.s m.s. 2. y (m) x (m) -0,4. -0,3. -0,2. -0,1. 0,1. 0,2. 0,3. 0,4.")
2
1) Quels outils pour décrire un mouvement ? 1.1. Référentiel et repère
Le mouvement d’un objet ponctuel est caractérisé par … A un référentiel sont associés : … y (m) x (m) 1 5 M1 M2 M0 M3 M4 Les repères usuels sont : …
 x (m) M1. M2. M0. M3. M4. Les repères usuels sont : …")
3
1) Quels outils pour décrire un mouvement ? 1.1. Référentiel et repère
Référentiel géocentrique Référentiel héliocentrique

4
Les repères usuels sont : …
Doc. 1 : les trois référentiels usuels. T Terre Soleil Dans le référentiel géocentrique, le centre de la Lune est décrit une ellipse. Dans le référentiel héliocentrique, le centre de la Terre décrit une ellipse dans le plan de l'écliptique. Référentiel héliocentrique : Etude du mouvement des astres autour du soleil. Référentiel géocentrique : Etude du mouvement des satellites autour de la Terre. Lune Référentiel terrestre : Etude des mouvements à la surface de la Terre. Les repères usuels sont : …

5
Doc. 2 : vecteur position dans le repère
1.2. Le vecteur position OM O x y z M Doc. 2 : vecteur position dans le repère orthonormé (O ; i , j , k ). La position d’un point M à la date t est donnée …
. La position d’un point M à la date t est donnée …")
6
Doc. 4 : Un compteur de vitesse indique la vitesse instantanée.
1.3. Le vecteur vitesse v Le vecteur vitesse caractérise … La vitesse moyenne d’un point M entre … Le vecteur vitesse v donne … Doc. 4 : Un compteur de vitesse indique la vitesse instantanée.

7
Comment tracer ce vecteur vitesse (instantané)
Comment tracer ce vecteur vitesse (instantané) ? (voir doc 3 et exemple 1) Exemple 1 : Pour tracer le vecteur vitesse v3 au point M3 : Le meilleur estimateur de sa direction est : Son sens est : Le meilleur estimateur de sa valeur est : On peut donc écrire v3 Tracer v3 (échelle 1 cm 1 m.s–1)
 (voir doc 3 et exemple 1) Exemple 1 : Pour tracer le vecteur vitesse v3 au point M3 : Le meilleur estimateur de sa direction est : Son sens est : Le meilleur estimateur de sa valeur est : On peut donc écrire v3 Tracer v3 (échelle 1 cm 1 m.s–1)")
8
Doc. 3 : Chronophotographie (simulation) du mouvement d’un ballon
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 EXEMPLE 1 : … y (m) x (m) 1 5 M1 M2 M0 M3 M4 t (s) Points x (m) y (m) t0 = 0 M0 x0 = 0 y0 = 0 t1 M1 x1 y1 t2 M2 x2 y2 t3 M3 x3 y3 t4 M4 x4 y4 … … … … ti-1 Mi-1 xi-1 yi-1 ti Mi xi yi ti+1 Mi+1 xi+1 yi+1 Doc. 3 : Chronophotographie (simulation) du mouvement d’un ballon Mesure de la distance M2M4
 x (m) M1. M2. M0. M3. M4. t (s) Points x (m) y (m) t0 = 0 M0 x0 = 0 y0 = 0. t1 M1 x1 y1. t2 M2 x2 y2. t3 M3 x3 y3. t4 M4 x4 y4. … … … … ti-1 Mi-1 xi-1 yi-1. ti Mi xi yi. ti+1 Mi+1 xi+1 yi+1. Doc. 3 : Chronophotographie (simulation) du mouvement d’un ballon. Mesure de la distance M2M4.")
9
Doc. 3 : Chronophotographie (simulation) du mouvement d’un ballon
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 EXEMPLE 1 : … y (m) x (m) 1 5 M1 M2 M0 M3 M4 t (s) Points x (m) y (m) t0 = 0 M0 x0 = 0 y0 = 0 t1 M1 x1 y1 t2 M2 x2 y2 t3 M3 x3 y3 t4 M4 x4 y4 … … … … ti-1 Mi-1 xi-1 yi-1 ti Mi xi yi ti+1 Mi+1 xi+1 yi+1 Doc. 3 : Chronophotographie (simulation) du mouvement d’un ballon Mesure de la distance M2M4 Attention à l’échelle !
 x (m) M1. M2. M0. M3. M4. t (s) Points x (m) y (m) t0 = 0 M0 x0 = 0 y0 = 0. t1 M1 x1 y1. t2 M2 x2 y2. t3 M3 x3 y3. t4 M4 x4 y4. … … … … ti-1 Mi-1 xi-1 yi-1. ti Mi xi yi. ti+1 Mi+1 xi+1 yi+1. Doc. 3 : Chronophotographie (simulation) du mouvement d’un ballon. Mesure de la distance M2M4. Attention à l’échelle !")
10
Doc. 3 : Chronophotographie (simulation) du mouvement d’un ballon
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 EXEMPLE 1 : tracé de v3 y (m) x (m) 1 5 M1 M2 M0 M3 M4 t (s) Points x (m) y (m) t0 = 0 M0 x0 = 0 y0 = 0 t1 M1 x1 y1 t2 M2 x2 y2 t3 M3 x3 y3 t4 M4 x4 y4 … … … … ti-1 Mi-1 xi-1 yi-1 ti Mi xi yi ti+1 Mi+1 xi+1 yi+1 Doc. 3 : Chronophotographie (simulation) du mouvement d’un ballon
 x (m) M1. M2. M0. M3. M4. t (s) Points x (m) y (m) t0 = 0 M0 x0 = 0 y0 = 0. t1 M1 x1 y1. t2 M2 x2 y2. t3 M3 x3 y3. t4 M4 x4 y4. … … … … ti-1 Mi-1 xi-1 yi-1. ti Mi xi yi. ti+1 Mi+1 xi+1 yi+1. Doc. 3 : Chronophotographie (simulation) du mouvement d’un ballon.")
12
Pour un point Mi quelconque de la trajectoire, …
Dans un référentiel donné, le vecteur vitesse du point M à la date t est … Le vecteur vitesse est porté … L’unité de sa valeur est … On a donc v(t) = … Sa valeur est alors égale …
 = … Sa valeur est alors égale …")
13
Exemple 2 : On pourra démontrer que pour ce ballon : x(t) = 2,8 t et y(t) = - 5,0 t² + 12,6 t.
En déduire les expressions de vx et vy, ainsi que sa valeur à l’instant t3.

14
1.4. Le vecteur accélération a
Le vecteur accélération caractérise … Par analogie avec le vecteur vitesse, on peut écrire … Dans un référentiel donné, le vecteur accélération du point M à la date t est … L’unité de sa valeur est … On a donc a(t) = … Sa valeur est alors égale … Exemple 3 : Donner les expressions et les valeurs des coordonnées de l’accélération de l’exemple 2. Conclusion.
 = … Sa valeur est alors égale … Exemple 3 : Donner les expressions et les valeurs des coordonnées de l’accélération de l’exemple 2. Conclusion.")
15
Doc. 5 : Mouvement rectiligne et uniforme
2) La première loi de Newton (ou principe d’inertie) 2.1. Mouvement rectiligne et uniforme Pour un tel mouvement, la trajectoire … Dans un référentiel donné, le mouvement d’un point est rectiligne et uniforme si … Doc. 5 : Mouvement rectiligne et uniforme Exemple 4 : Dans un repère (O, , ), les coordonnées du vecteur position d’un point M sont x(t) = 2,0.t et y(t) = -4,0.t + 1,0. Montrer que ce point a un mouvement rectiligne et uniforme. Donner les valeurs de sa vitesse et de son accélération. Pour un tel mouvement, l’accélération est … Remarque: un mouvement peut être …
 La première loi de Newton (ou principe d’inertie) 2.1. Mouvement rectiligne et uniforme. Pour un tel mouvement, la trajectoire … Dans un référentiel donné, le mouvement d’un point est rectiligne et uniforme si … Doc. 5 : Mouvement rectiligne et uniforme. Exemple 4 : Dans un repère (O, , ), les coordonnées du vecteur position d’un point M sont x(t) = 2,0.t et y(t) = -4,0.t + 1,0. Montrer que ce point a un mouvement rectiligne et uniforme. Donner les valeurs de sa vitesse et de son accélération. Pour un tel mouvement, l’accélération est … Remarque: un mouvement peut être …")
16
2.2. Système et forces

17
Terre Sol { le ballon } Pied Doc. 6. Air
Quelles sont toutes les actions mécaniques exercée par l’extérieur sur le ballon ? Action à distance Action de contact Extérieur P Terre Sol R Système étudié { le ballon } F Pied Doc. 6. f Air

18
On néglige maintenant les frottements et effet de l’air.
FSol/ballon FPied/ballon P = FTerre/ballon

19
2.3. Première loi de Newton ou principe d’inertie
Doc. 7 : Principe d’inertie, Newton, 1686 : « Tous corps persévère dans son état de repos ou de mouvement rectiligne et uniforme si les forces qui s’exercent sur lui se compensent ». Dans certains référentiels dits … Exemple 5 : Etude 1 : Représenter les forces s’exerçant sur le système {parachutiste} descendant à vitesse verticale constante dans le référentiel terrestre. Etude 2 : Représenter les forces s’exerçant sur le système {parachutiste+parachute} descendant à vitesse verticale constante dans le référentiel terrestre.

20
Un référentiel galiléen est …
Les référentiels terrestre, géocentrique et héliocentrique sont …

21
3) Autres exemples de mouvements dans un référentiel galiléen
3.1. Les mouvements rectilignes et uniformément variés Dans un référentiel donné, un point M a un tel mouvement si … Il peut être : - rectiligne et uniformément accéléré :… Doc. 8 : Mouvement rectiligne uniformément accéléré : Echelle des distances 1/600ème. a a V(20) V(10)
 V(10)")
22
3) Autres exemples de mouvements dans un référentiel galiléen
3.1. Les mouvements rectilignes et uniformément variés Il peut être : - rectiligne et uniformément décéléré ou freiné :… V1 V2 Doc. 9 : Mouvement rectiligne uniformément décéléré (ralenti ou freiné). a a
. a. a.")
23
3.2. Les mouvements circulaires et uniformes
Dans un référentiel donné, le mouvement d’un point est circulaire si … Il est uniforme si … 2 m.s - 1 50 m.s 2 y (m) x (m) -0,4 -0,3 -0,2 -0,1 0,1 0,2 0,3 0,4 On montre alors que le vecteur accélération est …
 x (m) -0,4. -0,3. -0,2. -0,1. 0,1. 0,2. 0,3. 0,4. On montre alors que le vecteur accélération est …")
25
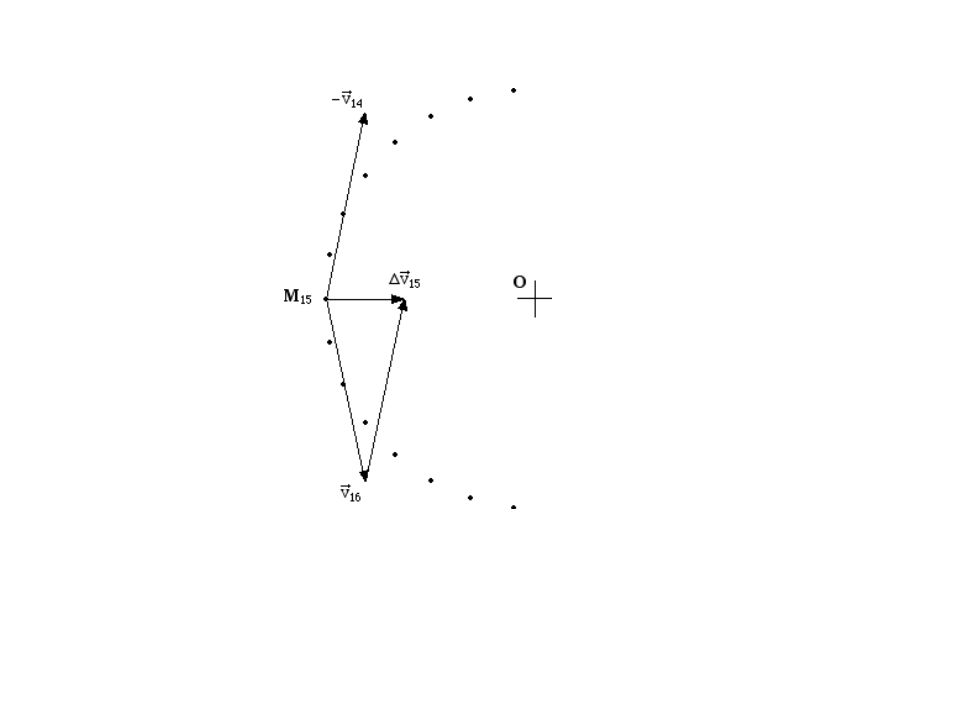
3.3. Les mouvements circulaires non uniformes
Pour un tel mouvement circulaire, le vecteur accélération … 2 m.s - 1 10 m.s 2 y (m) x (m) -1,5 -1 -0,5 0,5 1,5 -1,8 -1,6 -1,4 -1,2 -0,8 -0,6 -0,4 -0,2
 x (m) -1, ,5. 0,5. 1,5. -1,8. -1,6. -1,4. -1,2. -0,8. -0,6. -0,4. -0,2.")
26
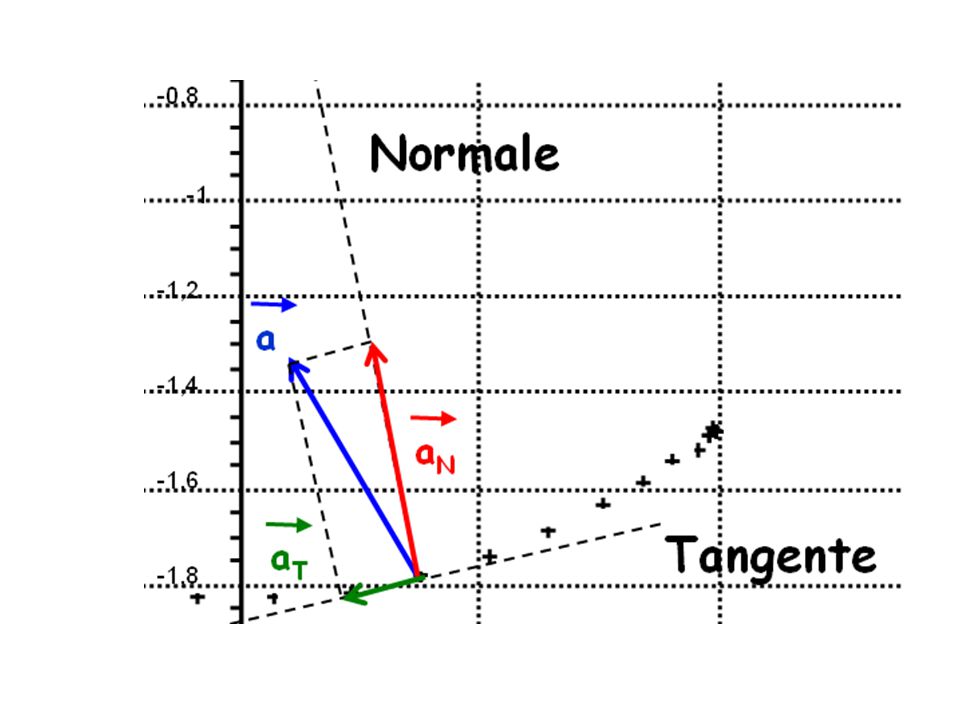
Remarque : on montre que …
y (m) x (m) -1,5 -1 -0,5 0,5 1 1,5 -1,8 -1,6 -1,4 -1,2 -0,8 -0,6 -0,4 -0,2 Normale a aN aT Tangente
 x (m) -1, ,5. 0, ,5. -1,8. -1,6. -1,4. -1,2. -0,8. -0,6. -0,4. -0,2. Normale. a. aN. aT. Tangente.")
28
Doc. 11 Mouvement rectiligne uniforme
Mouvement rectiligne uniformément accéléré Mouvement rectiligne uniformément décéléré G(t) G(t) G(t) Le vecteur vitesse est constant au cours du temps. Le vecteur accélération est nul. (v . a = 0 ) La valeur du vecteur vitesse augmente au cours du temps. Le vecteur accélération est constant. et sont de même sens. (v . a > 0 ) La valeur du vecteur vitesse diminue au cours du temps. Le vecteur accélération est constant. et sont de sens opposés. (v . a < 0 ) Doc. 11
 G(t) G(t) Le vecteur vitesse est constant au cours du temps. Le vecteur accélération est nul. (v . a = 0 ) La valeur du vecteur vitesse augmente au cours du temps. Le vecteur accélération est constant. et sont de même sens. (v . a > 0 ) La valeur du vecteur vitesse diminue au cours du temps. Le vecteur accélération est constant. et sont de sens opposés. (v . a < 0 ) Doc. 11.")
29
Doc. 11 Mouvement circulaire uniforme
Mouvement circulaire uniformément accéléré Mouvement circulaire uniformément décéléré G(t) G(t) G(t) R Rayon R R Tangente Tangente Tangente Centre C C C Le vecteur vitesse varie mais sa valeur est constante au cours du temps. Le vecteur accélération est dirigé vers le centre de la trajectoire. (v . a = 0 ) La valeur du vecteur vitesse augmente au cours du temps. Le vecteur accélération est constant et dirigé vers l’intérieur de la trajectoire. (v . a > 0 ) La valeur du vecteur vitesse diminue au cours du temps. Le vecteur accélération est constant et dirigé vers l’intérieur de la trajectoire. (v . a < 0 ) Doc. 11
 G(t) G(t) R. Rayon R. R. Tangente. Tangente. Tangente. Centre C. C. C. Le vecteur vitesse varie mais sa valeur est constante au cours du temps. Le vecteur accélération est dirigé vers le centre de la trajectoire. (v . a = 0 ) La valeur du vecteur vitesse augmente au cours du temps. Le vecteur accélération est constant et dirigé vers l’intérieur de la trajectoire. (v . a > 0 ) La valeur du vecteur vitesse diminue au cours du temps. Le vecteur accélération est constant et dirigé vers l’intérieur de la trajectoire. (v . a < 0 ) Doc. 11.")
Présentations similaires





 Trajectoire d’un mobile>")














 Diagramme d’interaction (0,5)>")
>")


