Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
y RAPTOR F-150 SVT

2
SOMMAIRE I)Présentation II)Autonomie -Définition et formules -L'autonomie attendue -L'autonomie simulée -Protocole -Mise en œuvre et résultats III)Accélération -Définition et formules -L'accélération simulée -Protocole -Mise en œuvre et résultats Bilan
Présentation II)Autonomie -Définition et formules -L autonomie attendue -L autonomie simulée -Protocole -Mise en œuvre et résultats III)Accélération -Définition et formules -L accélération simulée -Protocole -Mise en œuvre et résultats Bilan")
3
Présentation de l’existant Tout-terrainTéléguidée Résistante

4
AUTONOMIE

5
Définition Intervalle d'espace ou de temps pendant lequel la voiture peut fonctionner sans nouvel apport d'énergie, sans intervention extérieure. Milliampères par heure Capacité batterie Courant dans la charge x0.70

6
Autonomie attendu x 0.7 = 28 min 28min (voiture plein régime) 40min (voiture plein régime sans coefficient) 3000 4500
 40min (voiture plein régime sans coefficient)")
7
Simulation Autonomie

8
Protocole pour obtenir l’autonomie de la batterie Chargez au maximum la batterie de la voiture. Veuillez maintenir la voiture en l’air de manière à ce que les roues ne touchent pas le sol. Démarrez le chronomètre. Accélérez au max jusqu'à ce que la voiture se décharge, arrêtez le chronomètre quand la voiture s’est stoppé. Relevez le temps qu’a mis la voiture pour s’arrêter.

9
Résultat La voiture s’est arrêté exactement 40 minutes après la mise en route. Ce qui correspond à nos calculs sans le coefficient 0.7 (facteurs externes).
..")
10
ACCELERATION

11
Définition Pour calculer la vitesse linéaire de la voiture Raptor, on utilisera la relation suivante. a = Vf= vitesse finale (en m/s) Vi= vitesse initiale (en m/s) Tf= temps final (en s) Ti= temps initial (en s) a=accélération (m.s -2 ) Tf-Ti Vf-Vi L’accélération est la modification de la vitesse d’un mouvement en fonction du temps. Si l’accélération est négative, il s’agit d’une décélération.
 Vi= vitesse initiale (en m/s) Tf= temps final (en s) Ti= temps initial (en s) a=accélération (m.s -2 ) Tf-Ti Vf-Vi L’accélération est la modification de la vitesse d’un mouvement en fonction du temps. Si l’accélération est négative, il s’agit d’une décélération..")
12
Simulation Accélération

13
Protocole pour obtenir l’accélération de la voiture Raptor Prenez la voiture Raptor F150 SVT et établissez une piste de 40 mètres. Reliez la carte MyRio à la voiture. Effectuez un nombre de ligne droite avec la voiture Raptor F150 SVT nécessaire en accélérant dès le point de départ au maximum de sa vitesse. Relevez grâce à la carte MyRio, l’accélération sur le logiciel Labview -Prenez la voiture Raptor F150 SVT et établissez une piste d'une dizaine de mètres. -Démarrez la voiture et l’accélérer au maximum tout en filmant -A l'aide du logiciel Avi méca et Regressi relevez les valeurs et déterminez la vitesse finale. -Trouver l’accélération maximale à l'aide de la relation nécessaire. OU

14
Résultats La courbe de la position en fonction du temps. Vf=6.8 m/s Vi=0 m/s Tf=1.8 s Ti= 0 s a= 6,8-0 1,8-0 Donc=3.7 m/s 2

15
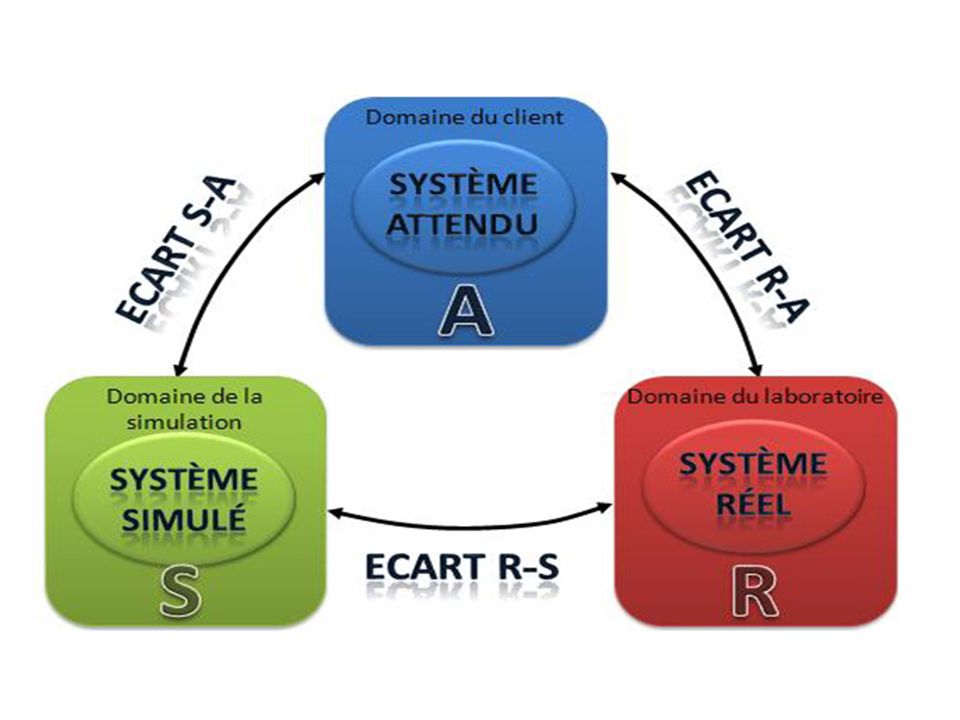
Bilan Autonomie : Les résultats de la mise en œuvre et la simulation faite sur mathlab concorde avec ce qu’avait annoncé le constructeur. (Réel=Simulé=Attendu) Accélératio n: Les résultats réel/simulé concordent mais le constructeur n’avait pas précisé la valeur.(Réel=Simulé≠Attendu)
 Accélératio n: Les résultats réel/simulé concordent mais le constructeur n’avait pas précisé la valeur.(Réel=Simulé≠Attendu).")
Présentations similaires











>")

. - Définir la trajectoire dun point dun.>")



 Chapitre 4: Le potentiel électrique Le champ électrique donne la force agissant sur une unité de charge en un point.>")

 -Son accélération angulaire est nulle.>")