Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Analyse d’images Détection de contour Cours 8
Faculté des sciences de Tunis Année universitaire Analyse d’images Détection de contour Cours 8 Mohamed Naouai

2
Détection de contours Qu’est ce qu’un contour ?

3
Détection de contours Image Originale

4
Image Originale Détection de contour

5
Introduction La mise en évidence des points représentant les contours d'objets dans une image peut servir à: reconnaître des objets présents dans une scène différencier des zones de l'image faire de la segmentation d'images extraire une information réduite souvent pertinente pour caractériser l'image.

6
Détection de contours La détection de contour est une étape préliminaire à de nombreuses applications de l'analyse d'images. Les contours constituent en effet des indices riches, au même titre que les points d'intérêts, pour toute interprétation ultérieure de l'image.

7
Détection de contours Les contours dans une image proviennent des :
discontinuités de la fonction de réflectance (texture, ombre). discontinuités de profondeur (bords de l'objet). ils sont caractérisés par des discontinuités de la fonction d'intensité dans les images.
. discontinuités de profondeur (bords de l objet). ils sont caractérisés par des discontinuités de la fonction d intensité dans les images.")
8
Détection de contours Un contour se matérialise par une rupture d'intensité dans l'image suivant une direction donnée. Plusieurs méthodes existent pour détecter cette rupture, les unes plus ou moins complexes, les autres plus ou moins gourmandes en calculs.

9
Détection de contours Dans la plupart des cas et en particulier pour ceux présentées ici, la même méthodologie est employée. Elle s'applique en deux étapes : la première permet de localiser les contours à partir d'un calcul de Gradient ou de Laplacien dans des directions privilégiées tout en quantifiant l'importance du contour. La seconde étape va permettre d'isoler les contours du reste de l'image à partir d'un seuillage judicieux

10
Détection de contours Le principe de la détection de contours repose donc sur l'étude des dérivées de la fonction d'intensité dans l'image : les extrema locaux du gradient de la fonction d'intensité les passages par zéro du laplacien. La difficulté réside dans la présence de bruit dans les images.

11
Détection de contours Ces deux étapes sont indépendantes, il existe donc un grand nombre de combinaisons calcul de (Gradient, opération de seuillage) conduisant à la mise en évidence des contours. Notre rôle consiste à choisir les opérateurs les mieux pour satisfaire les exigences associées à l'image à traiter.
 conduisant à la mise en évidence des contours. Notre rôle consiste à choisir les opérateurs les mieux pour satisfaire les exigences associées à l image à traiter.")
12
Dérivée première Détection des contours Dérivée seconde Profil

13
Le filtrage linéaire d'une image
Filtrer une image consiste à convoluer sa fonction d'intensité I(x, y) avec une fonction h(x, y) appelée réponse impulsionnelle du filtre.
 avec une fonction h(x, y) appelée réponse impulsionnelle du filtre.")
14
Le gradient d'une image En considérant l'image dans un repère orthogonal (Oxy) tel que (Ox) désigne l'axe horizontal et (Oy) l'axe vertical, le Gradient de l'image en tout point ou pixel de coordonnées (x,y) est désigné par :
 tel que (Ox) désigne l axe horizontal et (Oy) l axe vertical, le Gradient de l image en tout point ou pixel de coordonnées (x,y) est désigné par :")
15
Le module du gradient Le module du gradient permet de quantifier l'importance du contour mis en évidence, c'est-à-dire l'amplitude du saut d'intensité relevé dans l'image :

16
La direction du gradient
La direction du gradient permet de déterminer l'arête présente dans l'image. En effet, la direction du gradient est orthogonale à celle du contour :

17
Le gradient d'une image

18
Détermination de la direction du gradient
Calculer la dérivée directionnelle dans certaines directions dans le repère image (e.g. 0°, 45°, 90°, 135°)
")
19
Détermination de la direction du gradient

20
Le gradient d'une image Le principe de la détection de contours par l'utilisation du gradient consiste à calculer le gradient de l'image dans deux directions orthogonales puis le module du gradient. Il s'agira ensuite d'effectuer une sélection des contours les plus marqués, c'est-à-dire les points de plus fort contraste par un seuillage adéquat.

21
Le gradient d'une image

22
Le gradient d'une image La direction du gradient maximise la dérivée directionnelle. La dérivée de I(x, y) dans une direction donnée d s'écrit : Le gradient d'une image filtrée :

23
Le gradient d'une image

24
Quelques opérateurs gradient
Introduction Ces opérateurs sont à considérer comme des filtres qui vont être corrélés à l'image. Le filtrage seras effectué suivant les lignes de l'image puis suivant les colonnes. Pour chaque opérateur, deux masques sont utilisés de façon à déterminer le gradient de l'image dans deux directions orthogonales.

25
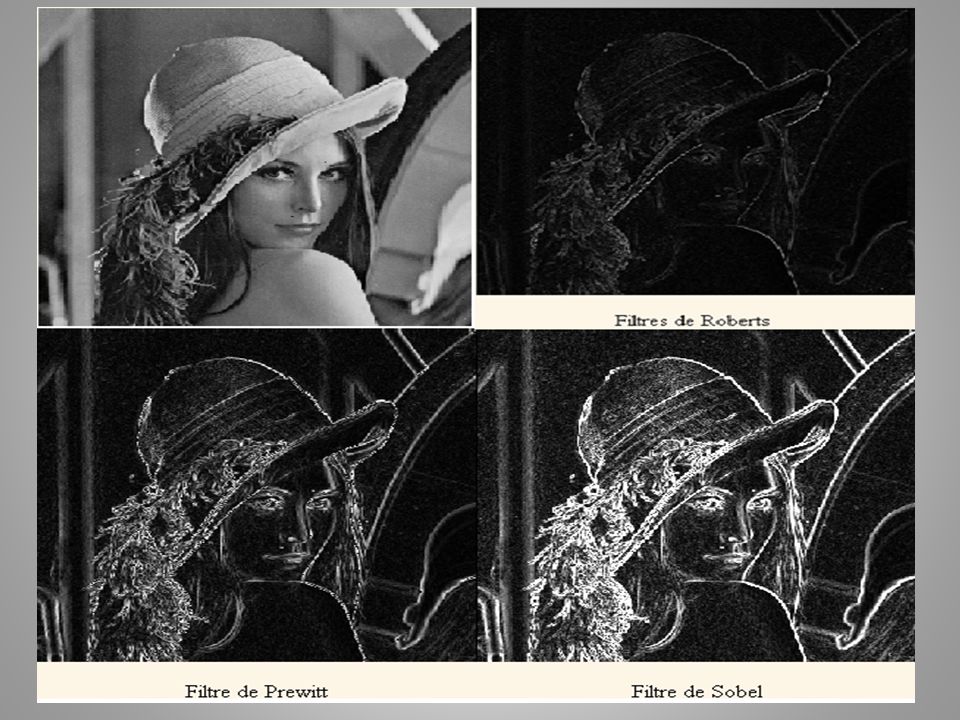
Opérateur de Roberts Ce masque proposé en 1965 permet de calculer un gradient le long des diagonales de l'image : La corrélation de ce masque avec l'image f(i,j) permet bien d'implanter un gradient dans la direction verticale :
 permet bien d implanter un gradient dans la direction verticale :")
26
Opérateur de Roberts

27
Opérateur de Roberts Image des contours Image originale
(opérateur Prewitt) Image originale
 Image originale.")
28
Opérateur de Roberts Inconvénient
Le majeur inconvénient de ces masques réside dans leur forte sensibilité au bruit.

29
Opérateurs de Prewitt La convolution de l'image par deux masques correspond au calculs des dérivées de l'image pré-filtrée par un filtre h séparable :

30
Opérateurs de Prewitt Image des contours Image originale
(opérateur Prewitt) Image originale
 Image originale.")
31
Opérateurs de Prewitt Image des contours Image originale
(opérateur Prewitt) Image originale
 Image originale.")
32
Opérateurs de Sobel (1972) L’Opérateur de Sobel est un opérateur utilisé en traitement d'image pour la détection de contours. Il s'agit d'un des opérateurs les plus simples qui donne toutefois des résultats corrects.

33
Opérateurs de Sobel (1972) Pour faire simple, l'opérateur calcule le gradient de l'intensité de chaque pixel. Ceci indique la direction de la plus forte variation du clair au sombre, ainsi que le taux de changement dans cette direction. On connaît alors les points de changement soudain de luminosité, correspondant probablement à des bords, ainsi que l'orientation de ces bords.
![]()
34
Opérateurs de Sobel (1972) Est un opérateur très populaire.
Correspond à la convolution de l'image par :[1 2 1] * [-1 0 1]. Masques directionnels également.

35
Opérateurs de Sobel (1972) Les filtres de Sobel sont les suivants :
Filtre horizontal : Filtre vertical :

36
Opérateurs de Sobel (1972)
")
37
Opérateurs de Sobel (1972) Détection de contour par Sobel
Image Originale

38
Opérateurs de Sobel (1972) Image des contours Image originale
(opérateur Sobel) Image originale
 Image originale.")
40
Opérateur gradient boussole
Les opérateurs dits boussole mesurent le gradient dans des direction sélectionnées. L'image est successivement filtrée par un ensemble de masques mk(i,j) dont chacun représente une approximation discrète d'un contour idéal dans une orientation spécifique. Le résultat du filtrage de l'image f(i,j) avec le kième masque est gk(i,j).
 dont chacun représente une approximation discrète d un contour idéal dans une orientation spécifique. Le résultat du filtrage de l image f(i,j) avec le kième masque est gk(i,j).")
41
Opérateur gradient boussole
Il s'agit alors de garder les contours correspondant à l'orientation du masque ayant conduit au maximum des fonctions gk(i,j) avec k allant de 0 à 7, représentatif des huit principales directions d'une boussole.
 avec k allant de 0 à 7, représentatif des huit principales directions d une boussole.")
42
Opérateur gradient boussole
Un autre critère possible revient à chercher le masque correspondant à la direction du contour dont le coefficient de corrélation avec l'image initiale est le plus fort. Il s'agit de minimiser rk(i,j) l'inverse du coefficient de corrélation.
 l inverse du coefficient de corrélation.")
43
Opérateur gradient boussole
critère 1 : critère 2 : avec:

44
Opérateur gradient boussole
Plusieurs masques peuvent être utilisés. La démarche consiste à choisir un type de masque puis à effectuer des permutations circulaires dans les huit directions possibles du gradient.

45
Opérateur gradient boussole
Des exemples d'opérateurs gradient boussole dans la direction Nord sont présentés ci-dessous en recourant aux masques de Prewitt, de Kirsch, de Robinson de niveau 3 ou 5. Le terme de niveau désigne le nombre de valeurs différentes présentes dans le masque.

46
Opérateur gradient boussole
Des exemples d'opérateurs gradient boussole dans la direction Nord sont présentés ci-dessous en recourant aux masques de Prewitt, de Kirsch, de Robinson de niveau 3 ou 5. Le terme de niveau désigne le nombre de valeurs différentes présentes dans le masque.

47
Opérateur gradient boussole

48
Opérateur gradient boussole
Opérateurs de Kirch

49
Opérateur gradient boussole

50
Méthodes de seuillage Cette opération nécessite le réglage d'un paramètre : le seuil S. Si la valeur du module du gradient en un pixel de l'image dépasse le seuil fixé, la valeur résultante du pixel est 1. Dans le cas contraire, la valeur du pixel est fixée à 0 :

51
Méthodes de seuillage L'objectif est de conserver uniquement les maxima locaux dans une direction du gradient. Le principe est de comparer la norme du gradient en tout point M(i,j) de l'image avec celles de ses deux voisins M1 et M2 situés dans la direction du gradient.
 de l image avec celles de ses deux voisins M1 et M2 situés dans la direction du gradient.")
52
Méthodes de seuillage L'algorithme met donc en évidence les maxima locaux dans des directions privilégiées (quatre directions dans l'exemple proposé). Il reste ensuite à sélectionner les maxima à conserver en utilisant la techniques de seuillage présentées précédemment.
. Il reste ensuite à sélectionner les maxima à conserver en utilisant la techniques de seuillage présentées précédemment.")
53
Méthodes de seuillage

54
Méthodes de seuillage

55
Le laplacien d'une image
Le laplacien d'une image d'intensité I(x,y) est défini par : Invariant aux rotations de l'image. Le laplacien est souvent utilisé en amélioration d'images pour accentuer l'effet de contour :
 est défini par : Invariant aux rotations de l image. Le laplacien est souvent utilisé en amélioration d images pour accentuer l effet de contour :")
56
Le laplacien d'une image
Sensibilité au bruit accrue par rapport au gradient. Le laplacien d'une image filtrée :

57
Le laplacien d'une image

58
Le laplacien d'une image

59
Le laplacien d'une image
Le Laplacien peut s'écrire : Cette opération de calcul de Laplacien peut alors être appliquée à une image par l'intermédiaire d'un filtrage avec le masque 3*3 suivant :

60
Le laplacien d'une image
D'autres masques peuvent être utilisés

61
Le laplacien d'une image

62
Le laplacien d'une image

63
Le laplacien d'une image

64
Le laplacien d'une image

65
Résumé La détection de contour Deux approches :
Approche gradient : détermination des extrema locaux dans la direction du gradient. Approche laplacien : détermination des passages par zéro du laplacien.

66
Remarque La détection de contour
Le calcul de dérivée nécessite un pré-filtrage des images. Filtrage linéaire pour les bruits de moyenne nulle (par exemple bruit blanc Gaussien, filtre Gaussien). Filtrage non-linéaire pour les bruits impulsionnels (filtre médian par exemple).
. Filtrage non-linéaire pour les bruits impulsionnels (filtre médian par exemple).")
Présentations similaires