Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Cours #4 Photométrie et traitement de la couleur
Plan Découvertes Photométrie Caméras IR, multispectrales, 3D Caméras couleur Traitement de la couleur Échantillonnage Géométrie discrète Représentation

2
Forum

3
Découverte A. R. Weeks, Jr., Fundamentals of Electronic Image Processing, IEEE/SPIE Press, 1996. A. Marion, Acquisition & visualisation des images, Eyrolles, FF (~$70,00) L’autre classique en vision en France Description en détail de tout le processus d’acquisition des images. Aucun traitement ou pré-traitement
 L’autre classique en vision en France. Description en détail de tout le processus d’acquisition des images. Aucun traitement ou pré-traitement.")
4
Découverte : La couleur
Revue Science & Vie Junior, dossier hors-série, La couleur, 2001. La couleur sous toutes ses … couleurs Traitement simple et accessible des principaux concepts Revue pour la Science, dossier hors-série, La couleur, Avril 2000. Approche scientifique Illusions, anomalies, etc. Thèmes développés: Comprendre la couleur Produire la couleur Percevoir la couleur La couleur dans la culture Giordano Beretta, Understanding color, HP, 2000. Site du cours, onglet Documents divers

5
Découverte : La couleur (suite)
A. Trémeau, C. Fernandez-Maloigne et P. Bonton, Image numérique couleur - de l’acquisition au traitement Dunod, 2004 Acheté à Paris, avril 2004 Espaces couleur Systèmes d’acquisition couleur Segmentation Compression Applications

6
1.4 Photométrie Étude des différents capteurs pour traduire l’éclairement irradié sur le plan image en signal électrique.

7
Caméra Conventionnelle, avec film Numérique 2 3,2 5 6 Mégapixels
Interface USB
![]()
8
Caméra noir&blanc CCD: la plus commune
Fréquence de balayage: 30 champs/s 525 lignes

10
Caméra couleur

11
2 types de détecteur des signaux de couleurs différentes
Filtre IR CCD couleur 3 CCDs noir et blanc

12
Stockage en mémoire

13
Images résultantes CCD couleur Résolutions spatiales différentes
Couleurs différentes 3 CCDs noir et blanc CCD couleur

14
Les images R, G et B Lumière blanche Lumière rouge Lumière bleue
Lumière verte Lumière bleue

15
Les intensitées des images R, G et B
Lumière blanche Lumière rouge Lumière verte Lumière bleue

16
Aberrations chromatiques causées par la lentille de la caméra couleur
Les rayons lumineux ne convergent donc pas tous au même point focal.

17
Effets des aberrations chromatiques sur les images R, G et B
Lumière blanche Lumière rouge Lumière verte Lumière bleue

18
Bande vidéo: véhicules et animaux
Caméra infra-rouge C’est la température de surface qui est captée Applications militaires Bande vidéo: véhicules et animaux

19
Surveillance des feux de forêts

20
Mesures de l’isolation de bâtiments

21
Caméras 3D Images de profondeur Papier Circuit intégré

22
Surfaces 3D générées Papier Circuit intégré

23
Triangulation laser Balayage synchronisé

25
Défocalisation par double ouverture: caméra Biris

26
Triangulation stéréo Stéréo active
Source de lumière ponctuelle et colorée pour assister l ’appariement

27
Exemple d’image stéréo couleur

28
Imagerie médicale Rayons X Tomographie axiale

29
Imagerie médicale Générations d’images 3D par techniques de déprojection basées sur une série d’images 2D Reconstructions de virus observés au microscope électronique

30
Générations d’images 2D par techniques de reconstruction basées sur une série de signaux 1D (tomographie axiale) Reconstructions de sections d’un genou de moustique observé en rayons X

31
Caméra multispectrale Caméra hyperspectrale
4-10 longueurs d’ondes (couleurs) Caméra hyperspectrale longueurs d’ondes (couleurs) Ex: photos aériennes et satellites Pour chaque pixel d’une image, le spectre de réflectance renseigne sur: Composition chimique des sols Géologie, Déversements industriels Types d’agriculture Blé, Orge, Cannabis
 Caméra hyperspectrale longueurs d’ondes (couleurs) Ex: photos aériennes et satellites. Pour chaque pixel d’une image, le spectre de réflectance renseigne sur: Composition chimique des sols. Géologie, Déversements industriels. Types d’agriculture. Blé, Orge, Cannabis.")
32
Principes d’une caméra multispectrale
Analyse spectrale

33
Exemple d’une série d’images multispectrales

34
Identification des types de sols à partir des spectres mesurés

35
Autres capteurs Rayons X Ultra Violets Infra Rouges
Avec focus: lentilles cylindriques (distance focale finie) Sans focus: système Charpak (distance focale infinie) Détection par ionisation Ultra Violets Lentilles en quartz Détecteurs à état solide Infra Rouges Système refroidi Détecteurs bolométriques et à état solide
 Sans focus: système Charpak (distance focale infinie) Détection par ionisation. Ultra Violets. Lentilles en quartz. Détecteurs à état solide. Infra Rouges. Système refroidi. Détecteurs bolométriques et à état solide.")
36
Télescope à rayons X

37
Micro-ondes Ondes radio Miroirs paraboliques,
Bolomètres et interféromètres Ondes radio Interféromètres (ex. radiotélescope VLA) Récepteurs radio refroidis
 Récepteurs radio refroidis.")
38
1.5 Traitement de la couleur

40
1.5.1 Perception de la couleur

42
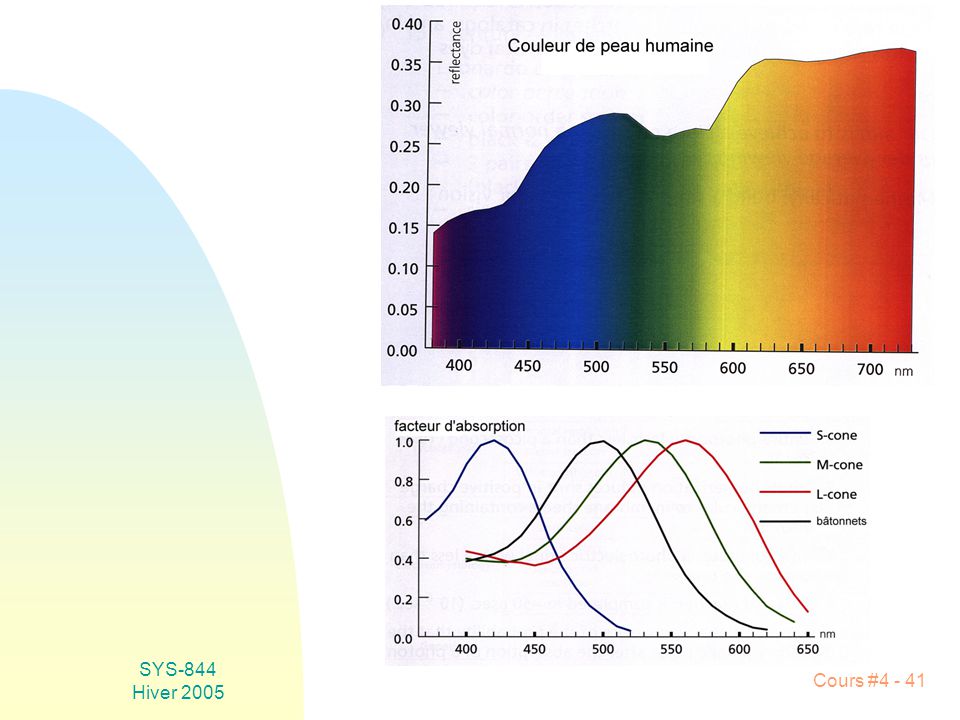
Les cônes et la bâtonnets sur la rétine
6-7 millions détectent les couleurs fonctionnent en lumière intense (jour) situés sur la tâche jaune (fovea) Grande densité (images nettes) N.B. On regarde directement un objet Les bâtonnets 125 millions ne détectent pas les couleurs fonctionnent en lumière faible (nuit) situés autour de la tâche jaune Faible densité (images plus floues) N.B. On doit regarder à côté d’un objet pour le voir!
 situés sur la tâche jaune (fovea) Grande densité (images nettes) N.B. On regarde directement un objet. Les bâtonnets. 125 millions. ne détectent pas les couleurs. fonctionnent en lumière faible (nuit) situés autour de la tâche jaune. Faible densité (images plus floues) N.B. On doit regarder à côté d’un objet pour le voir!")
43
Les cônes et les bâtonnets

44
Appariement de couleurs
La facilité à discerner deux couleurs dépend de leur contraste et de celui du signal de fond.

45
Impression de profondeur générée par lignes de contour colorées
Nébuleuse et étoiles

46
Circuit intégré

47
Termes subjectifs pour décrire une couleur
Teinte, tonalité chromatique (hue) Couleur perçue (eg bleu marine, orange, etc) Luminosité (brightness) Niveau de gris équivalent Clarté (lightness) Niveau de coloration, chromaticité (colorfulness) Chroma Saturation % de blanc dans la couleur (ex.: rose= rouge avec blanc rose moins saturé que rouge) ref.: Understanding Color (understandColor.pdf)
 Couleur perçue (eg bleu marine, orange, etc) Luminosité (brightness) Niveau de gris équivalent. Clarté (lightness) Niveau de coloration, chromaticité (colorfulness) Chroma. Saturation. % de blanc dans la couleur. (ex.: rose= rouge avec blanc. rose moins saturé que rouge) ref.: Understanding Color (understandColor.pdf)")
48
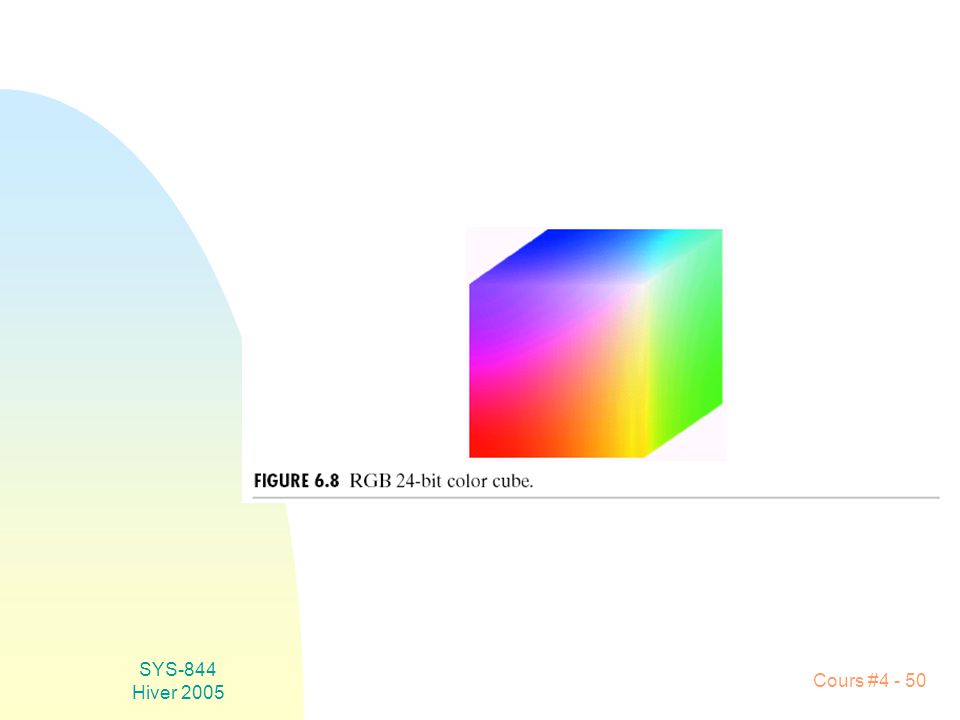
1.5.2 Modèle RVB (RGB) L ’information de couleur est décomposée selon l’éclairement dans 3 bandes: Rouge, Vert et Bleu.
 L ’information de couleur est décomposée selon l’éclairement dans 3 bandes: Rouge, Vert et Bleu.")
49
B V R Cyan Bleu Magenta Blanc Noir Vert Rouge Jaune Niveaux de gris
Ligne de Noir Vert Rouge Jaune

51
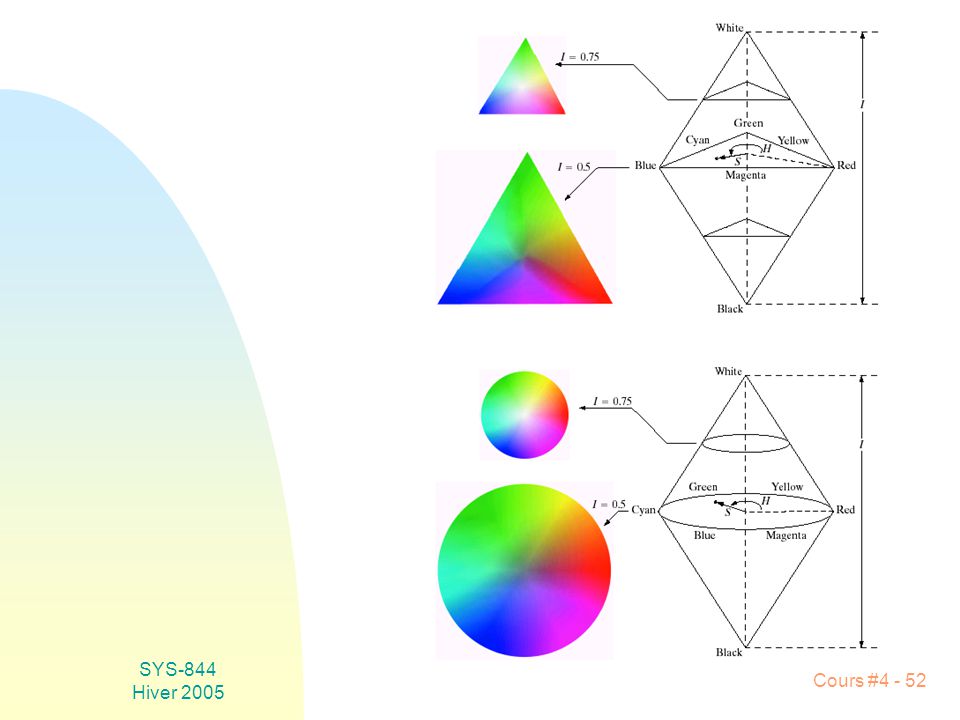
1 composante pour la clarté 2 composantes pour la couleur
1.5.2 Modèles chromatiques 1 composante pour la clarté 2 composantes pour la couleur Modèle HSL Hue, Saturation, Lightness

53
blanc S H L B V R V B R noir

54
Système RGB Système HSV

55
Les images R, G et B Lumière blanche Lumière rouge Lumière bleue
Lumière verte Lumière bleue

56
Les images H, S et V Lumière blanche Image de teinte (H)
Image d’intensité (V) Image de saturation (S)
 Image de saturation (S)")
57
Les images H, S et V sont très utilisées pour segmenter les images couleurs
Exemple: On veut segmenter la fleur jaune

58
Identification des pixels dans un intervalle de valeurs de teinte (hue)
![]()
59
Identification des pixels dans un intervalle de valeurs de saturation
![]()
60
Identification des pixels communs aux deux images précédentes
![]()
61
Identification du périmètre de la région résultante

62
Superposition du contour à l’image initiale

63
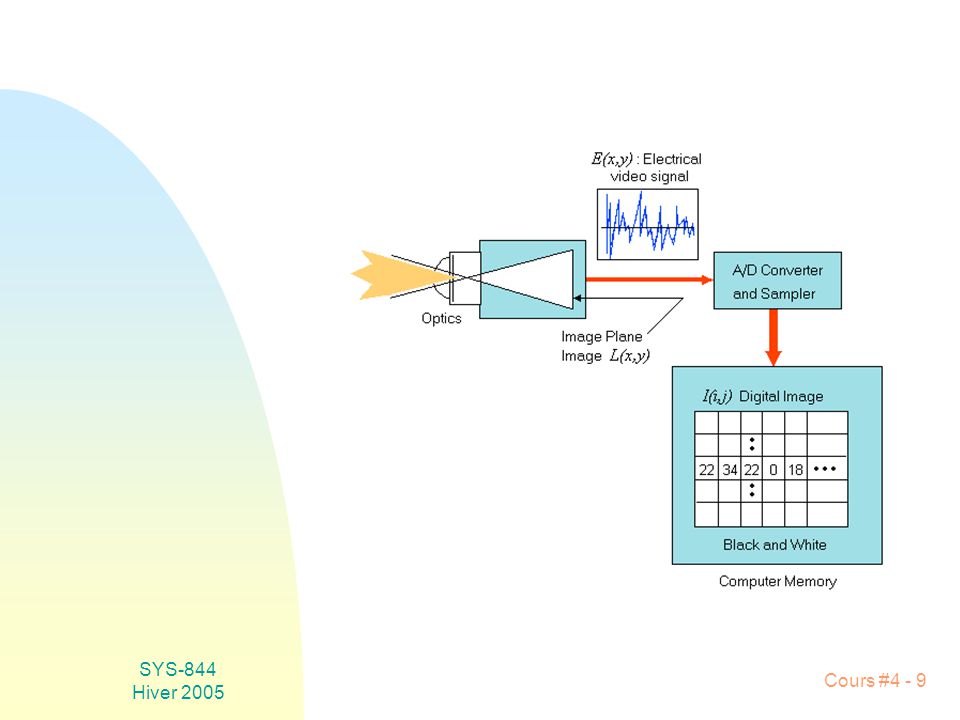
1.6 Numérisation La numérisation est la conversion du signal électrique continu (dans l ’espace ou temps et en valeur) en un signal numérique discret (image numérique).
 en un signal numérique discret (image numérique).")
64
Décisions: Résolution spatiale ou échantillonnage: Combien d ’échantillons ? Tessellation: Forme des pixels ? Quantification: Combien de niveaux discrets sont suffisants pour couvrir la plage du signal ? (en bits).
![]()
65
1.6.1 Échantillonnage Théorème de Nyquist
Avec x : intervalle (x ou y) d ’échantillonnage et d : dimension de la plus petite structure dans l ’image Équivalent fréquentiel (e.g. 5 poteaux / mètre)
 d ’échantillonnage. et d : dimension de la plus petite structure dans l ’image. Équivalent fréquentiel (e.g. 5 poteaux / mètre)")
66
Essai: échantillonnage à la clôture

67
1er essai: intervalle de l ’ordre de d

68
1er essai: résultat: information perdue

69
2e essai: intervalle de l ’ordre de d/2

70
Essai: résumé

71
1.6.2 Éclairement d ’un pixel
02/04/2017 1.6.2 Éclairement d ’un pixel La valeur d’éclairement est la valeur moyenne de la luminance projetée par la scène sur la surface d’intersection de l’angle solide.
![]()
72
Atténuation de contraste

73
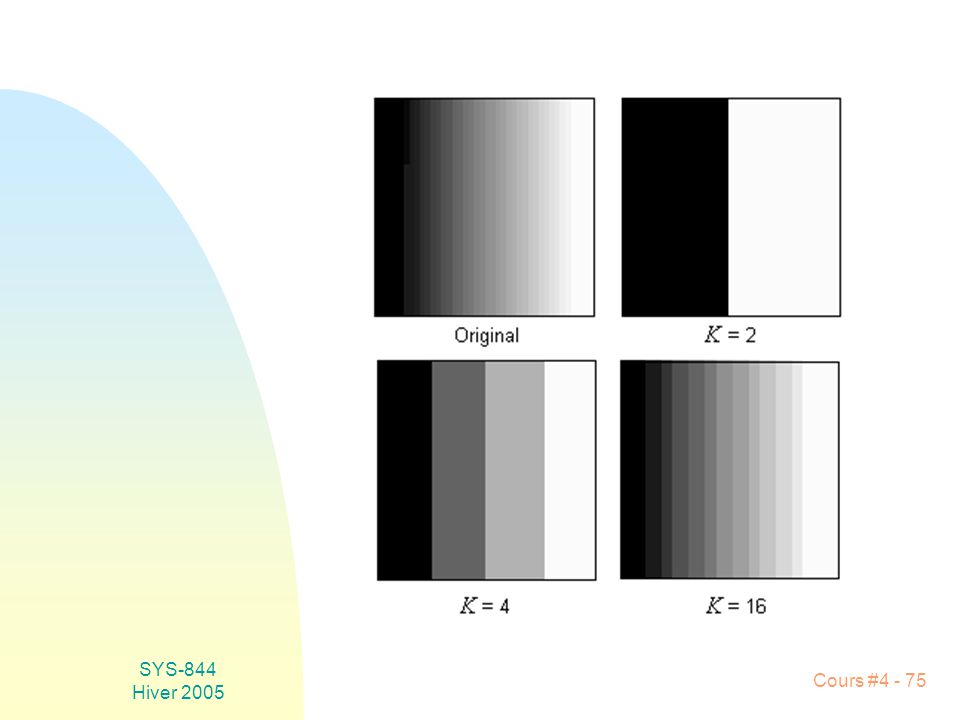
1.6.3 Discrétisation Transformer le signal continu d’éclairement en 1 de K valeurs discrètes de niveaux de gris

74
Soit E(x,y) un signal continu
0 E(x,y) M K = plage de valeurs discrètes (niveaux de gris)
 M. K = plage de valeurs discrètes (niveaux de gris)")
76
Effets de la discrétisation (suite)
N= N= N=8 N= N= N=256

77
Fonctions de discrétisation:
Uniforme logarithmique

78
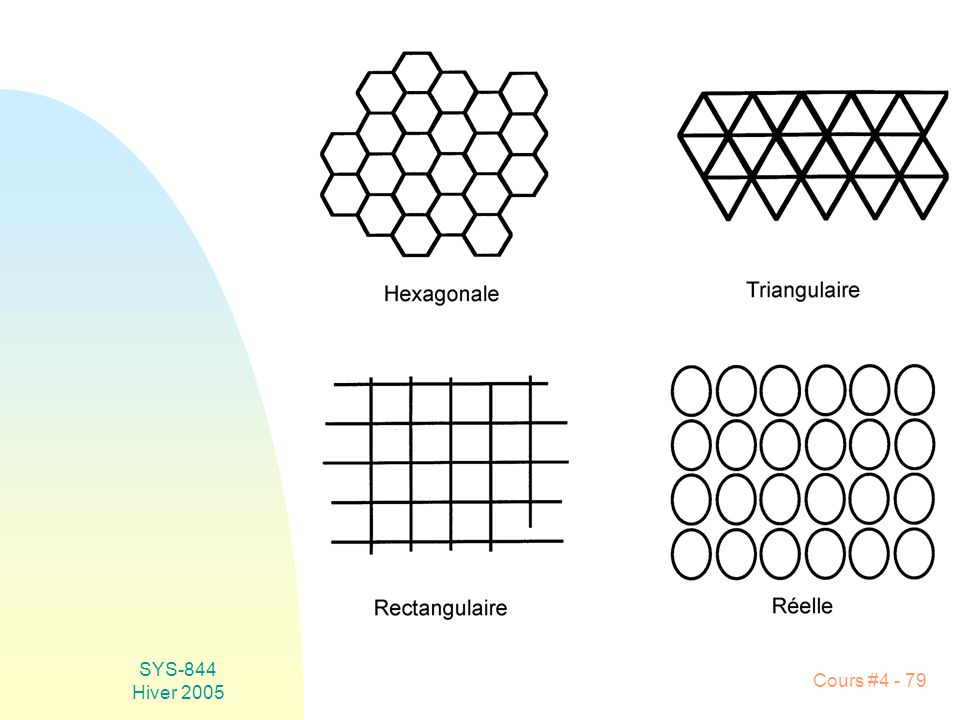
1.6.4 Tessellation (pavage)
C’est la forme du pixel. Le pavage est «choisi» pour couvrir au mieux le plan image. Le pavage est donc une partition du plan image qui, une fois discrétisé, résulte en un maillage qui représente la grille d ’échantillonnage

80
1.7 Géométrie discrète 1.7.1 Connectivité

81
Points connectés: 2 points P1 et P2 sont connectés si un tracé peut être trouvé sur lequel une fonction appliquée sur l’image donne la même valeur tout le long du parcours.

82
Étiquettage des zones connectées:
algorithme de croissance.

83
Le voisinage d ’un pixel peut être défini 4 - ou 8 - voisins.
![]()
84
Aucune de ces définitions de voisinage n’est satisfaisante
02/04/2017 Connectivité 4 - voisins Connectivité 8 - voisins On veut décrire ici une courbe fermée qui sépare l’arrière-plan en 2. 4-voisins: ArP est séparé en deux … par des courbes non-fermées! 8-voisins: courbe fermée qui ne partitionne pas l’ArP! Un solution possible est d’utiliser une voisinage 8-voisins pour les objets et un voisinage 4-voisins pour l’arrière-plan (ArP). Cette solution requiert, par contre, des connaissances a priori. Aucune de ces définitions de voisinage n’est satisfaisante
. Cette solution requiert, par contre, des connaissances a priori. Aucune de ces définitions de voisinage n’est satisfaisante.")
85
1.7.3 Distance Soient P1(i,j) et P2(n,m) Distance euclidienne
Distance «pâté de maison» Distance «tour d’échiquier»

86
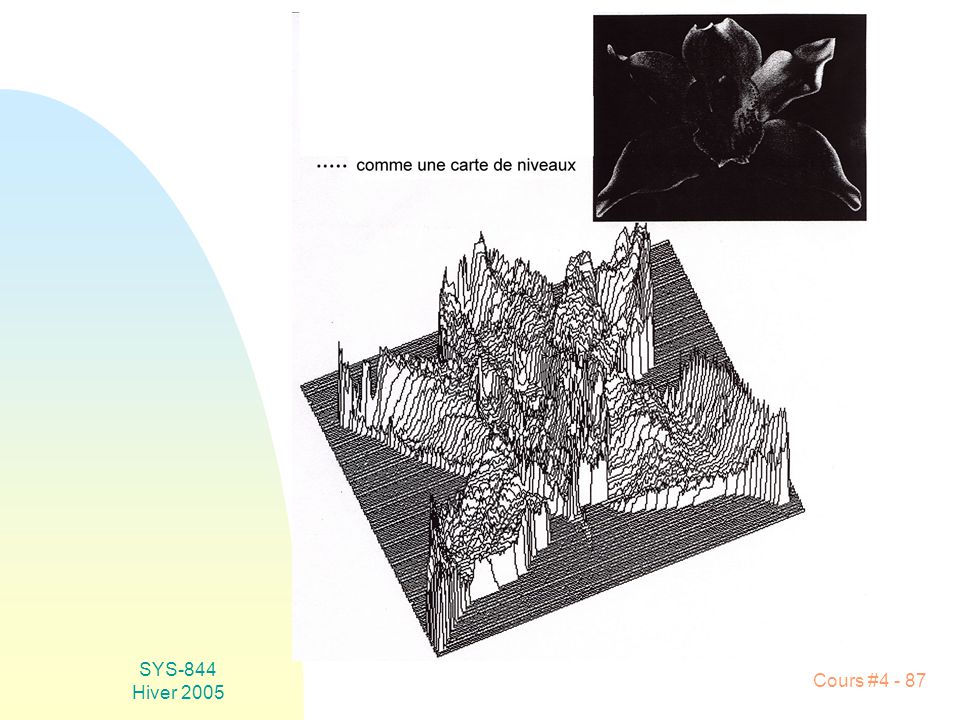
1.8 Représentation d’une image d’éclairement

Présentations similaires



















 Nombres (1-100).>")
