Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Des approches cognitives aux approches émergentes de l’apprentissage
Anne-Claire Macquet laboratoire de psychologie / ergonomie du sport INSEP

2
Coordination : organisation des parties constituant un tout
les systèmes complexes mettent en œuvre des comportements stables et organisés ces comportements sont réalisés dans des environnements dynamiques (instables) apparition de comportements stables dans des environnements instables
 apparition de comportements stables dans des environnements instables.")
3
Différents types de coordination
des coordinations mono-segmentaires des coordinations multisegmentaires

4
Question Comment expliquer l’organisation des différentes coordinations mono-segmentaires, qui engendre une action fluide, précise, efficace… bref une action coordonnée ? exemples : réalisation de tâches d’anticipation-coïncidence ou apprentissage de mouvement combinés, appris séparément (courir / sauter)
")
5
Le système apparaît complexe
une centaine d’articulations présente dans le corps humain (une centaine) 792 muscles (nécessité de contraction des muscles agonistes et de relâchement des muscles antagonistes) nécessité d’organiser l’ensemble pour obtenir une action fluide, précise, efficace Comment concevoir cette organisation ?
 792 muscles (nécessité de contraction des muscles agonistes et de relâchement des muscles antagonistes) nécessité d’organiser l’ensemble pour obtenir une action fluide, précise, efficace. Comment concevoir cette organisation")
6
Le système évolue dans un environnement complexe
la temporalité peut être longue ou brève ; l’échéance peut être connue ou inconnue l’incertitude spatiale, temporelle et / ou événementielle peut être élevée ou faible le contrôle de l’action peut concerner toute la situation ou plus modestement une partie de cette situation

7
Dans ces conditions... Comment s’organisent les coordinations motrices ? Comment sont-elles régulées au cours de la réalisation du mouvement ? Existe-t-il un centre de la régulation et du contrôle ?

8
Des éléments de réponse
idée de planification et de prescription : système hiérarchique, programmation motrice centralisée au niveau du SNC notion de « pilote mental » idée d’un acteur rationnel notion de capacité limitées du système

9
idée d’émergence : système couplé à l’environnement, comportement auto-organisé, coordination macroscopique (observable) comme produit de coordinations microscopiques (locales) notion d’émergence idée de « bricolage »

10
Considérations importantes

12
Attention à différencier
Comment fonctionne le système ? théories du contrôle moteur Comment évolue le système ? théories du développement Comment apprend le système ? théories de l’apprentissage Comment le système est-il guidé pour apprendre ? théories de l’enseignement, didactique

13
Théories du contrôle moteur
théorie cognitiviste : notions de programme moteur théorie écologique : notion de structure de coordination théorie des systèmes dynamiques non linéaires : notion d’auto-organisation du comportement considéré comme un ensemble de structures de coordinations

14
Le comportement est prescrit par un programme
postulat : le cerveau humain traite des informations à la manière d’un ordinateur décision : elle est programmée au niveau central - organisation hiérarchique de la perception et de la motricité contrôle : il s’opère à partir d’un système hiérarchique (A/R entre le cerveau et les systèmes perceptifs). Mais les capacités du système sont limitées (goulot d ’étranglement, Von Neuman)
. Mais les capacités du système sont limitées (goulot d ’étranglement, Von Neuman)")
15
Système de traitement de l’information
perception décision comportement Feed-backs intrinsèques Feed-backs liés à l ’environnement

16
Le comportement émerge des contraintes du couplage
postulat : le système est couplé à son environnement (ils sont indissociables) décision : elle émerge de ce couplage, en fonction des contraintes (notion d’auto-organisation) contrôle : il émerge des interactions entre les sous-systèmes (les coordinations sont gérées à un niveau local)
 décision : elle émerge de ce couplage, en fonction des contraintes (notion d’auto-organisation) contrôle : il émerge des interactions entre les sous-systèmes (les coordinations sont gérées à un niveau local)")
17
Cycle perception-action Newell et McDonald (1994)
tâche Perception action Mode de coordination contraintes organisme environnement

18
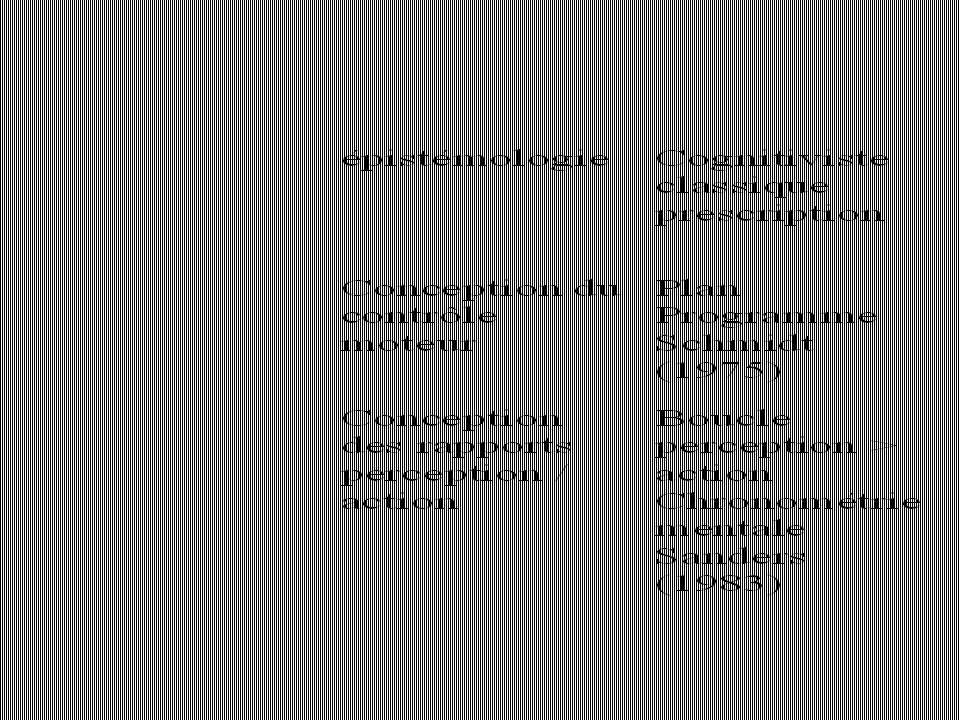
Deux logiques d’analyse du comportement

19
Le comportement du système émerge des liens perception-action
émergence de l’action auto-organisation de l’action (coordinations locales à partir de contraintes décelées dans le couplage) organisation locale de micro-coordinations qui composent une macro-organisation
 organisation locale de micro-coordinations qui composent une macro-organisation.")
20
Le comportement est prescrit au sein d’une organisation hiérarchique
planification et programmation motrice contrôle centralisé différentiation individu / environnement

21
Comment concevoir qu’une commande centrale puisse diriger l’ensemble des articulations du corps?
Capacités limitées du système de traitement de l’information complexité de l’environnement complexité du système

22
Comment concevoir que les coordinations soient organisées localement ?
Comment l’intention élaborée au niveau du SNC est-elle reliée aux coordinations auto-organisées ? Comment l’ensemble de ces coordinations peut-il produire un tout cohérent (action efficace, fluide, précise) ? importance des contraintes qui incitent à une modification du couplage notion d’organisation collective (cf colonies d’abeilles, de fourmis, dans lesquelles les insectes s’organisent les uns par rapport aux autres)
 importance des contraintes qui incitent à une modification du couplage. notion d’organisation collective (cf colonies d’abeilles, de fourmis, dans lesquelles les insectes s’organisent les uns par rapport aux autres)")
23
Présentation de l’UE Programme centré sur la notion d’émergence du comportement Les approches écologiques Les approches dynamiques des coordinations motrices non linéaires Les approches situées de l’apprentissage La place du contexte, du sens de l’individu et du collectif dans l’apprentissage

Présentations similaires