Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
VOITURE ROBOT DESPREZ François

2
SOMMAIRE Présentation du cahier des charges Présentation de la voiture
Conception préliminaire Chaîne d’énergie Schéma de la coque Quantité d’énergie Simulation d’une partie de la chaîne d’énergie Conception détaillée Protocole de mesure de la vitesse Programme de déplacement de la voiture

3
Enjeu : Afin d'optimiser nos chances de remporter un concours de robotique, on souhaite connaître et maitriser les performances d'un véhicule robot. Lors de ce concours, notre robot devra être capable de s'orienter de façon autonome dans un milieu inconnu. L'aspect esthétique ne devra pas être négligé c'est pourquoi la conception d'une coque doit être prévue. Problématique : Comment connaître et maitriser les performances d’un véhicule robot ? Comment rendre ce véhicule robot esthétique ? Thème sociétal : Robotique Présentation du cahier des charges

4
Maxi en marche avant et en marche arrière f0
FONCTIONS DE SERVICE CRITERES NIVEAUX FLEXIBILITE FP1 Permettre à l'utilisateur de maitriser les performances du véhicule robot Vitesse Maxi en marche avant et en marche arrière f0 Accélération Décélération Rayon de braquage FC1 Se classer correctement Classement final Dans les 3 premiers f2 FC2 Aucune intervention de l'utilisateur lors du déplacement du véhicule Autonomie du véhicule Totale FC3 Utiliser les capteurs présents sur le véhicule Capteurs infrarouge Distance mini et maxi Capteur sonore Intensité mini (dB) Capteur lumière Luxmètre angle FC4 Utiliser un logiciel de programmation et un logiciel de simulation adapté Réel Labview Arduino DecPic16 Flowcode f1 Simulé Matlab Scilab Sinusphy Avimeca FC5 Utiliser l'energie disponible: Tension et courant continues 7,2V - 2A FC6 Avoir une forme pratique et un design esthétique Fixation La plus simple possible Capteurs Ne pas altérer leurs fonctionnements Accès à la connectique Sans démontage FC7 S'adapter à une carte d'acquisition existante Carte d'acquisition NI-usb-6809 Arduino-uno PIC-18F456 FC8 Contourner les obstacles du parcours (challenge) Largeur - Longueur 40 cm - 50 cm
 Capteur lumière. Luxmètre angle. FC4. Utiliser un logiciel de programmation et un logiciel de simulation adapté. Réel. Labview Arduino DecPic16 Flowcode. f1. Simulé. Matlab Scilab Sinusphy Avimeca. FC5. Utiliser l energie disponible: Tension et courant continues. 7,2V - 2A. FC6. Avoir une forme pratique et un design esthétique. Fixation. La plus simple possible. Capteurs. Ne pas altérer leurs fonctionnements. Accès à la connectique. Sans démontage. FC7. S adapter à une carte d acquisition existante. Carte d acquisition. NI-usb-6809 Arduino-uno PIC-18F456. FC8. Contourner les obstacles du parcours (challenge) Largeur - Longueur. 40 cm - 50 cm.")
5
Diagramme des interactions
Voiture Robot FP1 FC2 FC1 Utilisateur Traitement informatique Concours robotique FC3 Capteurs Energie FC5 Esthétisme FC6 Acquisition des grandeurs physiques Obstacles à contourner Présentation du cahier des charges

6
Composants Présentation de la voiture

7
Chaîne d’énergie Conception préliminaire

8
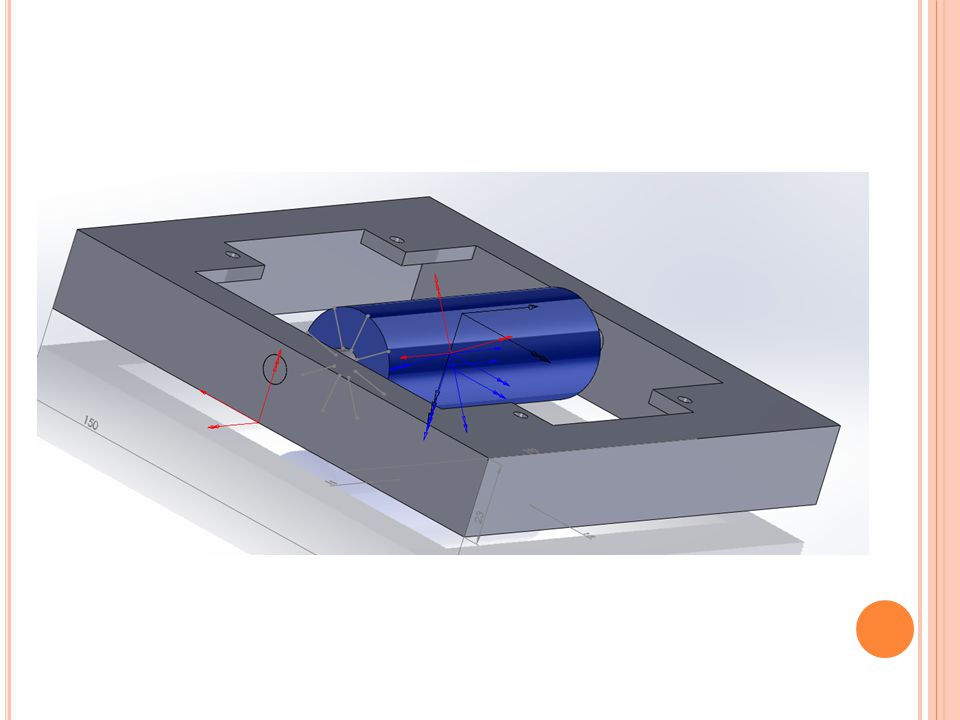
Schéma de la coque Conception préliminaire

9
Conception préliminaire

10
Conception préliminaire

11
Schéma du banc de test Conception préliminaire

13
Quantité d’énergie P=U.I
Pour calculer la quantité d’ énergie nécessaire à la voiture : P=U.I Pmax=7,2*2=14,4J Ptotal=13,7J Conception préliminaire

14
Simulation de l’alimentation
Conception préliminaire

15
Conception préliminaire

16
Simulation de la distribution
Conception préliminaire

17
Conception préliminaire

18
Protocole de mesure De la vitesse
On mesure la circonférence du rouleau (2πR), on place un trait sur le rouleau, on fait 10 tours de rouleau en mesurant le temps des 10 tours, de ce temps de la circonférence du rouleau, on en déduit la vitesse : V=D/T V=(10*2πR)/T Conception détaillée
, on place un trait sur le rouleau, on fait 10 tours de rouleau en mesurant le temps des 10 tours, de ce temps de la circonférence du rouleau, on en déduit la vitesse : V=D/T. V=(10*2πR)/T. Conception détaillée.")
Présentations similaires











>")







