Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Introduction à la commande
Application à la Commande Optimale Cherfaoui Nourrdine

2
Introduction à la commande Optimale
Partie I L’automatique Représentation des systèmes Notions sur la régulation PID Notion de robustesse Partie II Espace d’état Commande par placement de pôles Observateur Commande par placement de pôles et observateur Partie III Commande LQ Observateur optimale Commande LQG LQG/LTR

3
Introduction à la commande Optimale
Partie I L’automatique Représentation des systèmes Notions sur la régulation PID Notion de robustesse

4
L’automatique But Historique Compromis et contraintes
Quelques applications Les outils

5
de la commande des systèmes dynamiques. Elle a pour fondement
But L'automatique est une discipline qui traite de la modélisation, de l'analyse et de la commande des systèmes dynamiques. Elle a pour fondement théorique les mathématiques. L'état désiré du système est nommé la consigne. L’automatique consiste donc à commander un système en fonction d’une (ou plusieurs) consigne donnée par l’utilisateur (ou un autre système). Un exemple ‘simple’ est celui du régulateur de vitesse dans une automobile, il permet de la maintenir à une vitesse constante, prédéterminée par le conducteur. Dans ce cas, la consigne et une vitesse. Oulalalala, le régulateur ! Politiquement par correct
 consigne donnée. par l’utilisateur (ou un autre système). Un exemple ‘simple’ est celui du régulateur de vitesse dans une automobile, il. permet de la maintenir à une vitesse constante, prédéterminée par le. conducteur. Dans ce cas, la consigne et une vitesse. Oulalalala, le régulateur ! Politiquement par correct.")
6
Approche Fréquentielle
Historique Approche Fréquentielle 1942 ZIEGLER NICHOLS Réglage optimale du PID Approche Temporelle 1940 : BODE On est même à la limite De l’approche spacio- Temporelle ! 3 siècle av JC ! J’en étais resté à Wienner ! 1934 : BLACK 1932 : NYQUIST 1899 HEAVISIDE 1800 : LAPLACE Transformée 1788 : WATT Régulateur de vitesse 1894 : HURWITZ 1877 : ROUTH 1630 : DREBELL Régulateur de Température -III av J.C KTESIBIOS : Régulateur de niveau

7
Compromis Performance/Energie + on va vite + cela coût cher
Ex : Pour allez de 0 à 100Km : - Pied a fond > Rapide mais consommation élevée - Faible accélération -> Plus lent mais la consommation est réduite

8
Contrainte Performance/Robustesse
+ on va vite + le système doit être robuste Performance

9
installation d’épuration de gaz
Quelques applications Automobile : ABS/ESP/ASR…. UAV Dassault Aviation ‘’petit duc’’ installation d’épuration de gaz de haut-fourneau MP 89 CA ‘’METEOR’’

10
Les outils Et l’huile de coude

11
Représentation des systèmes
Notion de Système Systèmes Linéaires invariants La transformée de Laplace Fonction de transfert Domaine de stabilité

12
Notion de Système Un système (G) est défini par un ensemble de relation entre ses entrées et ses sorties Exemple Système : Résistance Entrée : i (t) Courant dans la résistance Sortie : u (t) Tension au borne de la résistance Relation : u (t) = R*i(t) Système : Masse ressort Entrée : F(t) Effort sur la masse Sortie : x(t) Position de la masse Relation : m.a(t) = m.g +F(t)+Fressort(t) Système y(t) u(t)
 Courant dans la résistance. Sortie : u (t) Tension au borne de la résistance. Relation : u (t) = R*i(t) Système : Masse ressort. Entrée : F(t) Effort sur la masse. Sortie : x(t) Position de la masse. Relation : m.a(t) = m.g +F(t)+Fressort(t) Système. y(t) u(t)")
13
Systèmes Linéaires invariants
Rq : On parle aussi de système : LTI (Linear Time Invariant) Linéaire Soit un système G qui a pour entrée ui(t) une réponse yi(t). Si ce système est linéaire alors il vérifie la propriété suivante: Invariant Un système est invariant si un décalage dans le temps du signal d'entrée, entraîne le même décalage sur le signal de sortie Je n’ai pas encore vu si tu en parlais, Mais tu peux parler du théorème de Superposition (juste en parler)
 Linéaire. Soit un système G qui a pour entrée ui(t) une réponse yi(t). Si ce système est linéaire alors il vérifie la propriété suivante: Invariant. Un système est invariant si un décalage dans le temps du signal. d entrée, entraîne le même décalage sur le signal de sortie. Je n’ai pas encore vu si tu en parlais, Mais tu peux parler du théorème de. Superposition (juste en parler)")
14
Rappel : La transformée de LAPLACE

15
Tables de Transformées de Laplace

16
Fonction de transfert Après avoir réalisé un bref sondage,
Ils ont vu ces choses … en spé. Donc, ça ne fera pas de mal Fonction de transfert On peut écrire la relation entrée sortie du système sous la forme d’une relation entre les dérivés successive des entrées/sorties : En appliquant la transformation de Laplace la relation entrée sortie se réécrit: (avec p la variable de Laplace et des conditions initiales nulles)
")
17
La fonction de transfert d’un système LTI est de la forme :
Vocabulaire G(p) est la fonction de transfert du Système L’ordre du système est n Les racines de B(p) sont les Zéros du Système Les racines de A(p) sont les Pôles du Système Si m< n le système est Strictement Propre Si m=n le système est Propre Si m>n le système est Impropre
 est la fonction de transfert du Système. L’ordre du système est n. Les racines de B(p) sont les Zéros du Système. Les racines de A(p) sont les Pôles du Système. Si m< n le système est Strictement Propre. Si m=n le système est Propre. Si m>n le système est Impropre.")
18
Remarque u(t) H(t) u(t) y(t) Système Système Impulsion
 H(t) u(t) y(t) Système Système Impulsion")
19
Exemple 1 : Système du premier ordre
Un système du premier ordre a une fonction de transfert de la forme :

20
Etude d’un système du premier ordre stable
Etudions la réponse à un échelon d’un système du premier ordre de la forme:

21
On observer que : -Tous les pôles du système sont négatifs. -Le système est stable (dans le sens entrée bornée / sortie bornée). -Le système est d’autant plus rapide que le pole est grand en valeur absolue. Rapide Lent Reel Stable

22
Etude d’un système du premier ordre instable
Etudions la réponse à un échelon d’un système du premier ordre de la forme:

23
On observer que : -Tous les pôles du système sont positifs. -Le système n’est pas stable (dans le sens entrée bornée / sortie bornée). -Le système est d’autant plus rapide que le pôle est grand en valeur absolue Rapide Lent Reel Stable Instable

24
Exemple 2 : Système du second ordre
Un système du second ordre a une fonction de transfert de la forme :

25
Etudions la réponse à un échelon d’un système du second ordre de la forme:
Les pôles de ce système sont : c= Pôles ± 0.866i c= Pôles ± 0.433i

26
On observer que : -Tous les pôles du système sont à parties réelles négatives. -Le système est oscillant. -Le système est stable (dans le sens entrée bornée / sortie bornée). Imaginaire Oscillant Rapide Lent Reel Stable Instable
. Imaginaire. Oscillant. Rapide. Lent. Reel. Stable. Instable.")
27
Domaine de stabilité Un système est stable si et seulement les pôles de la fonction de transfert sont à partie réelle strictement négative : + Dynamique +Oscillant Instable

28
Remarque sur les zeros Un système qui a un zéro à partie réelle positive est un système à non minimum de phase Influence d’un zéros dans le demi plan droit

29
Création de fonction de transfert :
MATLAB : tf SCILAB : rapport de polynôme Affichage des pôles et zéros : MATLAB : pzmap SCILAB : plzr MATLAB 6.5 SCILAB 4.0 Un ami : la fonction help

30
Notions sur la régulation PID
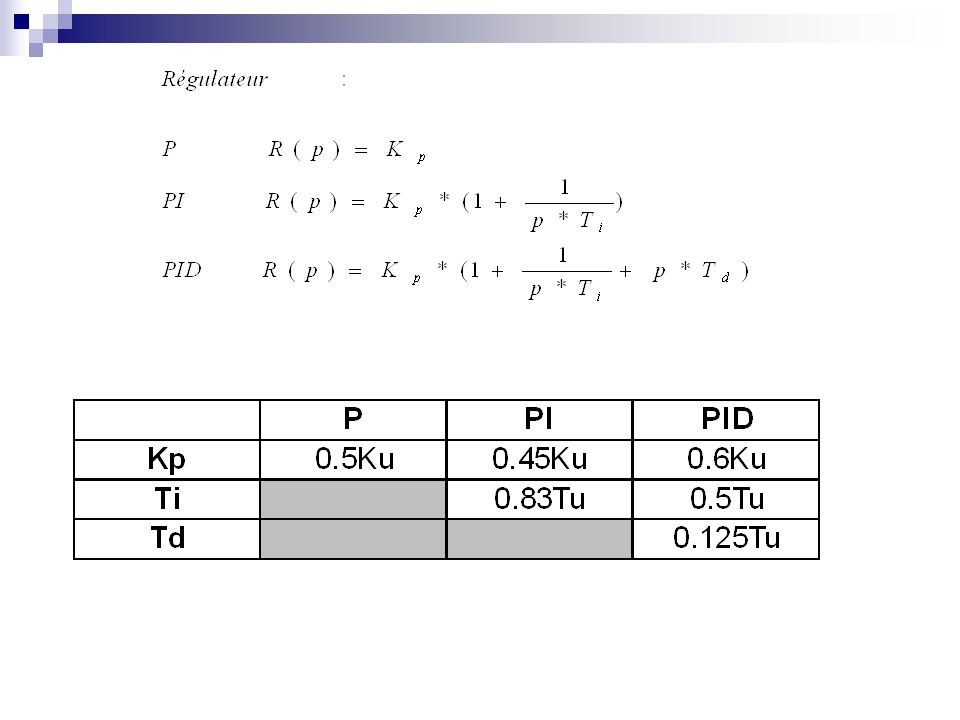
Les régulateur tout ou rien Régulation PID P PI PID Méthode de Ziegler Nichols Tu peux aussi ajouter une couche sur La stabilité en soulignant que dans certains Cas, le dénominateur de la fonction de transfert En Boucle fermée peut s’annuler.

31
Les régulateur tout ou rien
Régulateur simple du type chauffage : Si T > Seuil1 on coupe le chauffage Si T < Seuil2 on chauffe Contenu riche en harmonique Commutations rapides Sur des systèmes d’électroniques De puissance, cela peut entrainer Des pertes importantes. La structure est simple mais on ne peut pas définir de consigne précise Si l’écart entre les deux seuils est faible l’actionneur sera très sollicité

32
Le régulateur le plus simple
Régulateur de type proportionnel Le régulateur le plus simple y* + ε u y Régulateur système - La commande est proportionnel à l’erreur entre la consigne et la sortie du système

33
Pour une consigne en échelon et un système qui n’a pas de pôle en 0
(pas de comportement intégrateur) on à toujours une erreur statique si l’on utilise un régulateur de type P
 on à toujours une erreur statique. si l’on utilise un régulateur de type P.")
34
Kp ↑ : -l’erreur statique ↓ -vitesse ↑

35
Pour ne pas avoir d’erreur statique on ajoute une action intégrale
Régulateur de type proportionnel intégrale y* + ε u y Régulateur système - Pour ne pas avoir d’erreur statique on ajoute une action intégrale

36
L’utilisation de l’action intégrale annule l’erreur statique

37
Erreur statique = 0

38
Régulateur de type proportionnel intégrale dérivée
+ ε u y Régulateur système - Pour augmenter la dynamique est compenser les inerties dues au temps mort on à ajouter une action dérivée au régulateur

39
y* u + ε y Régulateur Retard de 1s 1/(p+1) -
 -")
40
Méthode de Ziegler Nichols
y* + ε u y K système - 1- On boucle le système avec un gain K variable et une entrée en échelon 2- On augmente K jusque à ce que le système soit oscillant Tu K=Ku

42
résumé Avantage des régulateur PID : -Structure simple -Pas besoin de modélisation pour la synthèse du régulateur Désavantage des régulateur PID -Réglage empirique -Pas de garantie sur les performances et la stabilité

43
Notion de robustesse Marge Module Gain Phase

44
y* + ε u y Régulateur système - y + ε Y* BO - BO est le transfert en boucle ouverte

45
L’étude de la BO ( Régulateur
L’étude de la BO ( Régulateur*Système) nous donne des informations sur la stabilité du système. Pour cela on dispose d’un certain nombre d’outils : Diagramme de Bode Deux courbes : 1/ Gain (Db) en fonction de la pulsation (en échelle log) 2/ Phase (° ou rad) en fonction de la pulsation (en échelle log)
 nous donne des informations sur la stabilité du système. Pour cela on dispose d’un certain nombre d’outils : Diagramme de Bode. Deux courbes : 1/ Gain (Db) en fonction de la pulsation (en échelle log) 2/ Phase (° ou rad) en fonction de la pulsation (en échelle log)")
46
Diagramme de Nyquist En abscisse : La partie réel de BO En ordonnée : La partie imaginaire de BO L’abscisse curviligne est la pulsation (en rad/s)
")
47
On remarque que si la BO passe dans le diagramme de Nyquist par le point
(-1,0) on a : Critère du revers Le système est stable si le lieu de Nyquist en BO parcouru dans le sens des fréquences croissantes, laisse le point critique (-1,0) constamment à sa gauche Réel Imaginaire -1 Stable R I -1 Limite de stabilité R I -1 Instable Le point (-1,0) est dit point critique, on va donc chercher à s’en éloigner Définition de marge de stabilité
 on a : Critère du revers. Le système est stable si le lieu de Nyquist en BO parcouru dans le sens des. fréquences croissantes, laisse le point critique (-1,0) constamment à sa gauche. Réel. Imaginaire. -1. Stable. R. I. -1. Limite de stabilité. R. I. -1. Instable. Le point (-1,0) est dit point critique, on va donc chercher à s’en éloigner. Définition de marge de stabilité.")
48
Marge de Gain : C’est la garantie que la stabilité sera maintenue malgré les variations imprévues du gain en boucle ouverte (BO) dues aux perturbations. (MG = 8 à 15 dB) Marge de Phase : C’est une garantie que la stabilité persistera malgré l’existence de retards parasites dont on n’a pas tenu compte dans le réglage. (Mph = 30 à 50 °) -180° dB F ° 1/(Marge de gain) A B I Marge de gain -1 B R A Point Critique Marge de phase Marge de phase
 dues aux perturbations. (MG = 8 à 15 dB) Marge de Phase : C’est une garantie que la stabilité persistera malgré l’existence de retards. parasites dont on n’a pas tenu compte dans le réglage. (Mph = 30 à 50 °) -180° dB. F ° 1/(Marge de gain) A B. I. Marge de gain. -1. B. R. A. Point Critique. Marge de phase. Marge de phase.")
49
Marge de module : la marge de module représente la plus petite distance de la BO au point critique et correspond donc au rayon du cercle centré sur le point critique qui tangente la courbe I -1 R Marge de module

50
Une dernière motivation pour la marge de module :
La synthèse d’un régulateur R se fait sur un modèle de système G qui n’est pas exactement égale au système physique réel ( dynamique négligée par exemple)
")
51
marge de module sera grande
La sensibilité à l’erreur de modélisation sera d’autant plus faible que la marge de module sera grande La fonction S est dite fonction de sensibilité. La fonction de transfert en boucle fermer T=1-S est dite fonction de Sensibilité complémentaire

52
exemple Régulateur système - + u ε y Y* On peut penser que : -Si l’on augmente k le système sera plus rapide car une petite variation de l’erreur ε produit une forte correction sur la commande. -Et que comme le système G est stable la BF sera stable

53
Nyquist de la BO k=2 k=2.5 K=3 K=3.5 Instable Pour cette exemple si la gain k≥3 le système en BF n’est pas stable

54
-La valeur des marges de gain, phase, module pour tenir compte des
Conclusion : Toujours vérifier : -La stabilité d’un système quelque que soit le type de synthèse utilisé -La valeur des marges de gain, phase, module pour tenir compte des erreurs de modélisation Quelques règles concernant la marge De phase / marge de gain ? (juste une suggestion)
")
55
Introduction à la commande Optimale
Partie II Espace d'état Commande par placement de pôles Observateur Commande par placement de pôles et observateur

56
Espace d'état Exemple : Le moteur électrique
U(t) E R L J I(t) Si on applique la transformation de Laplace aux équations précédentes on obtient
 E. R. L. J. I(t) Si on applique la transformation de Laplace aux équations précédentes on obtient.")
57
Info importante car tout excès de courant
La fonction G(p) nous donne la relation entre la tension d’alimentation du moteur et sa position mais cette représentation ne nous informe pas sur l’état du moteur: Courant dans le circuit Electrique Vitesse de rotation de l arbre Hors cet état était visible via les équations du système Info importante car tout excès de courant Est destructeur !!
 nous donne la relation entre la tension d’alimentation du moteur. et sa position mais cette représentation ne nous informe pas sur l’état du moteur: Courant dans le circuit Electrique. Vitesse de rotation de l arbre. Hors cet état était visible via les équations du système. Info importante car tout excès de courant. Est destructeur !!")
58
Si l’on pose le vecteur x suivant :
Si les variables qui nous intéresse pour le moteur sont : La position Angulaire, le courant et la vitesse de rotation on peut des équations précédentes tirer les relations suivantes : Si l’on pose le vecteur x suivant : On peut réécrire sous forme matricielle le système d’équation précèdente sous la forme : Avec ce type de représentation, Il peut être possible, dans certains Cas de commander indépendamment Plusieurs variables d’état du système

59
Représentation d'état On appelle représentation d’état (réalisation d’état) d’un système toute relation de la forme :

60
Mise sous forme de schéma bloc de la représentation d’état
G F E H x(t) u(t) y(t) La mémoire du système
 u(t) y(t) La mémoire du système.")
61
Trajectoires d’état La solution de l’équation d’état est dite Trajectoire d’état. Par intégration des équations d’état et de sortie, on obtient :

62
Relation entre forme d’état et fonction de transfert
Objectif : Obtenir une relation entre forme d’état et fonction de transfert. Première fois que je vois cette Notation. Il faut peut être La préciser ?

63
Les zéros du système sont les racines de
Les pôles du système sont les racines de : Le système est stable si et seulement si :

64
Pluralité de la représentation d’état
Remarque sur la pluralité de la représentation d’état

65
La fonction de transfert d’un système est invariante par changement de base

66
Relation entre fonction de transfert et forme d’état
Objectif : Obtenir une relation entre fonction de transfert et forme d’état Forme Modale Les modes du systèmes sont dans la matrice F Rq : Il existe d’autres relations entre Fonction de transfert et représentation d’état

67
MATLAB 6.5 SCILAB 4.0 tf2ss fonction de transfert vers représentation d’état ss2tf représentation d’état vers fonction de transfert Et toujours la fonction help

68
Un exemple Multivariable
Etat augmenté

69
Conclusion La représentation des systèmes sous forme d’état fournit une écriture condensée et simple aussi bien dans le cas mono que multi-variable. L’algèbre des matrices fournit des outils pour une manipulation simple des systèmes: -Changement de base -Construction de système augmenté Le formalisme d’état permet d’avoir accès à une information plus riche que la simple relation entrée sortie d’une fonction de transfert. MATLAB et SCILAB donne la possibilité de manipuler facilement des systèmes sous forme d’état. On verra dans la suite l’utilisation de ce formalisme dans la synthèse de loi de commande.

70
Commande par placement de pôles
La problématique de la synthèse d’un correcteur Commandabilité / Stabilisabilité Synthèse d’un retour d’état par placement de pôles Conclusion

71
Un problème d’automatique :
Deux questions : Problème de la poursuite de la consigne (cible) Problème la stabilité du système Une synthèse en deux temps 1/ Synthèse d’un régulateur stabilisant 2/ Synthèse finale qui tient compte de la poursuite
 Problème la stabilité du système. Une synthèse en deux temps. 1/ Synthèse d’un régulateur stabilisant. 2/ Synthèse finale qui tient compte de la poursuite.")
72
Commandabilité Peut-on amener en un temps fini le système à commander d’un état arbitraire x(t0) à un état désiré x(tf) avec une loi de commande admissible? Concept de Commandabilité des systèmes x(t0) x(tf) Dire que la commandabilité Permet d’identifier les variables D’état que l’on pourra commander Indépendamment. J’ai bon ? (J’avoue, la commande dans l’espace D’état, ça remonte à loin) Je dis ça juste pour leur donner une Accroche, un but qui permettra de mieux Suivre la suite
 avec une loi de commande admissible Concept de Commandabilité des systèmes. x(t0) x(tf) Dire que la commandabilité. Permet d’identifier les variables. D’état que l’on pourra commander. Indépendamment. J’ai bon (J’avoue, la commande dans l’espace. D’état, ça remonte à loin) Je dis ça juste pour leur donner une. Accroche, un but qui permettra de mieux. Suivre la suite.")
73
En partant de l’équation de la trajectoire d’état du système on peut obtenir
une relation entre le vecteur des commandes, les conditions initiales et finales du système et une matrice C dite matrice de commandabilité du système

74
On obtient donc une relation qui donne pour tout t une relation pour
déterminer la commande à appliquer. On remarque qu’il existe une infinité de lois de commandes qui vérifient : On choisira celle qui sera compatible avec l’objectif de commande que l’on cherche à réaliser (minimisation de l’énergie de commande ou dynamique) .
 .")
75
Propriété D’où vient la matrice de commandabilité ?
Comment on s’en sert ? Comment on identifie les variables d’état Non commandable ? Voir si tu pourrais pas, vite fait, ajouter Quelques infos là-dessus ? Sous MATLAB : Matrice de commandabilité : C = ctrb(F,G) Rang d’une matrice : r = rank(C) Sous SCILAB Matrice de commandabilité : C = cont_mat(F,G)
 Rang d’une matrice : r = rank(C) Sous SCILAB. Matrice de commandabilité : C = cont_mat(F,G)")
76
Remarque : Toutes les représentations d’état d’un même système ont le même rang de commandabilité. En effet, si l’on effectue un changement de base T la matrice de commandabilité associée est donnée par : La commandabilité est un invariant par changement de base

77
Décomposition selon la commandabilité
Si le système n’est pas complètement commandable, on peut le décomposer comme indiqué sur la figure suivante: Partie Commandable Non Commandable y(t)
")
78
Pour toute réalisation (F,G,H,E) d’ordre n tel que Rang(C(F,G))=r < n,
on peut toujours effectuer un changement de base :

79
Il n’y a pas d’explosion de la dynamique des états
Stabilisabilité Le principe de stabilisabilité a été introduit pour tenir compte du cas des modes non commandables. La paire (F,G) est dite stabilisable si et seulement si tous les modes non commandable sont asymptotiquement stables Il n’y a pas d’explosion de la dynamique des états
 est dite stabilisable si et seulement si tous les modes. non commandable sont asymptotiquement stables. Il n’y a pas d’explosion de la dynamique des états.")
80
Synthèse d’un retour d’état par placement de pôles
But: contrôler la valeur de la partie réelle Pour contrôler la dynamique des variables d’état G F E H x(t) u(t)= y*(t) - K.x(t) y(t) -K
 u(t)= y*(t) - K.x(t) y(t) -K.")
81
Cas de la régulation : y*(t)=0
Le système de commande est asymptotiquement stable si et seulement si le gain K vérifie la propriété suivante :

82
Avec openoffice, on n’a plus ce genre de délicatesse !
La dynamique du système est fixée par les modes de (F-GK). On peut assigner arbitrairement les modes du systèmes de commande si et seulement si le système est commandable : Avec openoffice, on n’a plus ce genre de délicatesse ! Vive openoffice !
. On peut assigner. arbitrairement les modes du systèmes de commande si et seulement si le système. est commandable : Avec openoffice, on n’a plus ce genre de délicatesse ! Vive openoffice !")
83
Exemple : Système commandable
La matrice de commandabilité de G et d’ordre 3, le système est donc commandable

84
Le système G stable mais oscillant
Car les pôles ont une partie imaginaire symétrique. Quand on construit une transformée de laplace contenant Deux pôles symétriques, on trouve une sinusoide dans le Domaine temporelle

85
Objective : rendre le système non oscillant mais sans ralentir son mode le plus
rapide via un retour d’état. On veut par exemple que tous les pôles du système commandable soient en -2

86
La synthèse du gain K vérifie bien la contrainte sur les pôles que l’on a spécifié.

87
y*=0 Régulation X0=[15; 10; -5] Gain de retour d’état Sys seul
Sys + Retour d’état y*=0 Régulation X0=[15; 10; -5] Gain de retour d’état
![y*=0 Régulation X0=[15; 10; -5] Gain de retour d’état Sys seul](http://slideplayer.fr/slide/1167777/3/images/87/y%2A%3D0+R%C3%A9gulation+X0%3D%5B15%3B+10%3B+-5%5D+Gain+de+retour+d%E2%80%99%C3%A9tat+Sys+seul.jpg "Sys + Retour d’état. y*=0. Régulation. X0=[15; 10; -5] Gain de retour d’état.")
88
Critère classique: Dépassement max de 20 %

89
Consigne en poursuite X0=[0 0 0]
![Consigne en poursuite X0=[0 0 0]](http://slideplayer.fr/slide/1167777/3/images/89/Consigne+en+poursuite+X0%3D%5B0+0+0%5D.jpg "Consigne en poursuite X0=[0 0 0]")
91
Influence de la recherche de dynamique sur la commande
K1 : pôles : K2 : pôles : Le réglage K1 est + dynamique Commande non admissible Le choix de la dynamique doit tenir compte de la limitation sur la commande

92
Exemple : Système non commandable
Les systèmes Sys1 et Sys2 ont le même comportement entrée/sortie mais Sys2 possède un état supplémentaire.

93
Le système Sys2 n’est pas commandable
Peut on quand même trouver un gain de retour d’état tel que tous les pôles du système de commande soit en -2 ?

94
On peut toujours essayer de trouver,
Mais comme un état est non commandable, Il est non controlable et va rapidement diverger ! Entrainant une rapide destruction du système ! Il faut un peu les secouer bordel !!!! Le système Sys2 n’étant pas commandable la recherche du gain de retour d’état K n’est pas possible

95
Sous MATLAB : K= place(F,G,pôles) Limitation : Can't place poles with multiplicity greater than rank(G). Sous SCILAB K= ppol(F,G,pôles)
")
96
Conclusion La commande à retour d’état par placement de pôles (commande modale) est relativement simple dans sa mise en œuvres, mais sur des systèmes complexes d’ordre élevé avec des vecteurs d’état qui ne sont pas toujours physique on arrive à des limites dans sa mise en œuvres Probléme 1: Les etats d’un systeme ne sont pas toujours mesurable, le coût des capteurs peut aussi être un frein à la commande par placement de pôles Une solution Les observateurs Problème 2: Comment choisir de façon optimale la valeur du gain de retour d’état toute en réalisant un compromis entre la dynamique du système et sa stabilité Une solution La commande optimale LQ Mesure de couple par capteur de contraintes Très cher. On passe effectivement par des Estimateurs sur les voitures

97
Observateur But Observabilité / Détectabilité
Synthèse d’un observateur Conclusion

98
Observateur Peut-on déterminer l’état d’un système à partir de la connaissance de son comportement d’entrée sortie sur un intervalle de temps fini ? Concept d’Observabilité des systèmes Système Observateur u(t) y(t) x(t)
 y(t) x(t)")
99
Prétentieux Quelle manipulation algébrique!

100
On peut donc reconstruire l’état du système à partir de ses signaux d’entrée-sortie
et de leurs dérivées successives.

101
Comment fait-on pour obtenir cette matrice ?
Observabilité Comment fait-on pour obtenir cette matrice ? Sous MATLAB : O = obsv(F,H) Sous SCILAB : O = obsv_mat (F,H)
 Sous SCILAB : O = obsv_mat (F,H)")
102
Remarque Toutes les représentations d’ état d’un même système ont le même rang d’observabilité. En effet, si l’on effectue un changement de base T la matrice d’obervabilité associée est donnée par: L’Observabilité est un invariant par changement de base

103
D’où vient cette notation ?
Synthèse d’un observateur D’où vient cette notation ?

104
G F E H x(t) y(t) u(t) M + -
 y(t) u(t) M + -")
105
La dynamique du système est fixée par les modes de (F-MH)
La dynamique du système est fixée par les modes de (F-MH). On peut assigner arbitrairement la dynamique de l’observateur si et seulement si le système est Observable :
. On peut assigner. arbitrairement la dynamique de l’observateur si et seulement si le système. est Observable :")
106
Décomposition selon l’observabilité
SI le système n’est pas complètement observable, on peut le décomposer comme indiqué sur la figure suivante: Partie Observable Non Observable u(t) y(t)
 y(t)")
107
Pour toute réalisation (F,G,H,E) d’ordre n telle que Rang(O(H,F))=r < n,
on peut toujours effectuer un changement de base :

108
Détectabilité Le principe de Détectabilité a été introduit pour tenir compte du cas des modes non observable. La paire (H,F) est Détectable si et seulement si tous les modes non observable sont asymptotiquement stables
 est Détectable si et seulement si tous les modes non. observable sont asymptotiquement stables.")
109
exemple La matrice d’obervabilité de G et d’ordre 3, le système est donc Observable

110
Objective : Faire la synthese d’un observateur pour le systeme G dont la dynamique
soit plus rapide que le pôle le plus rapide du systeme. Le pôle le plus rapide de G etant en -2 on souhaite par exemple que tous les pôles de l’observateur soit en -5

111
X0=[-20 ; -20;-20] L’observateur n’a pas les bonnes C.I. X0=[10;10;10] Gain de l’observateur
![X0=[-20 ; -20;-20] L’observateur n’a pas les bonnes C.I. X0=[10;10;10] Gain de l’observateur](http://slideplayer.fr/slide/1167777/3/images/111/X0%3D%5B-20+%3B+-20%3B-20%5D+L%E2%80%99observateur+n%E2%80%99a+pas+les+bonnes+C.I.+X0%3D%5B10%3B10%3B10%5D+Gain+de+l%E2%80%99observateur.jpg "X0=[-20 ; -20;-20] L’observateur n’a pas les bonnes C.I. X0=[10;10;10] Gain de l’observateur")
112
Pas mal du tout cet exemple
La sortie et l’etat de l’observateur converge bien vers celle du Systeme

113
Gain de place si tu écris Mt
Simulation avec un Observateur lent dont les pôles sont en -1 M=[-2 -2 1] Gain de place si tu écris Mt

114
Sous MATLAB : M= (place(FT,HT,pôles))T Limitation : Can't place poles with multiplicity greater than rank(H). Sous SCILAB M= (ppol(FT,HT,pôles))T
)T.")
115
Conclusion La synthese d’observateur par placement de pôles (observateur modale) est relativement simple dans sa mise en oeuvre, mais sur des systémes complexes d’ordre élevés avec des vecteurs d’états qui ne sont pas toujours physique on arrive à des limites dans sa mise en œuvres Probléme: Comment choisir la dynamique de l’observateur en fonction du mode que l’on veut observer Une solution Les observateurs du type Kalman

116
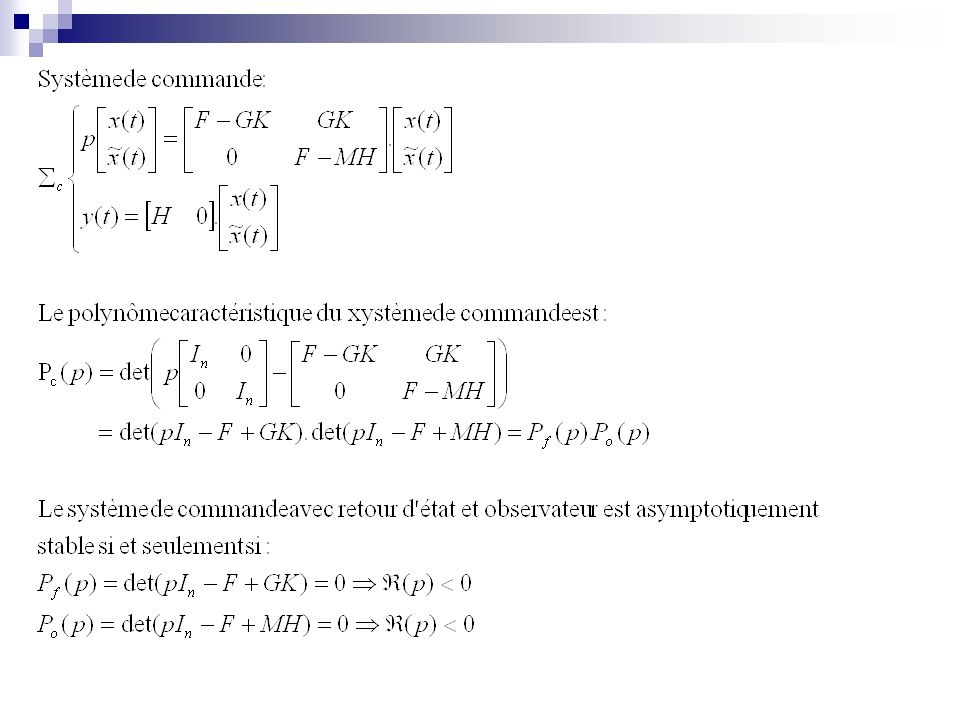
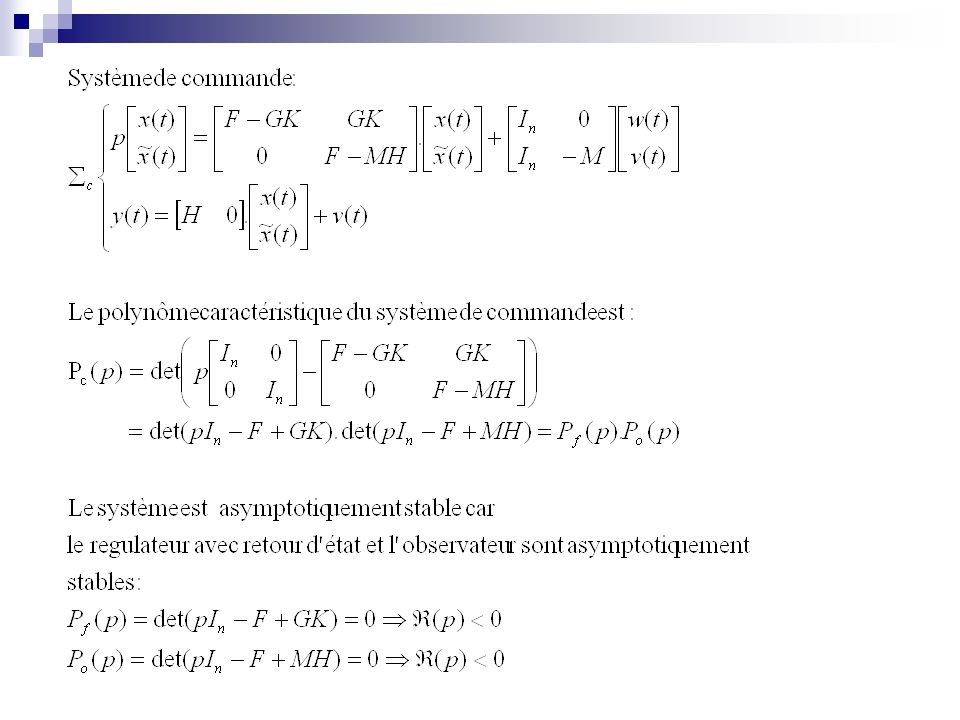
Commande par placement de pôles et observateur
Hypothèses pour la synthèse Exemple

117
Hypothese Plein Plein Plein

118
y(t) Système Observateur u(t) -K
 Système Observateur u(t) -K")
119
G F E H x(t) y(t) u(t) M + - -K
 y(t) u(t) M + - -K")
121
Exemple Le système est Commandable et Observable

122
- Faire la synthese d’un observateur pour le systeme G dont la dynamique
soit plus rapide que le pôle le plus rapide du systeme. Le pôle le plus rapide de G etant en -2 on souhaite par exemple que tous les pôles de l’observateur soit en -5 -Rendre le système non oscillant mais sans ralentir son mode le plus rapide via un retour d’état.On veut par exemple que tous les pôles du système de commandable soient en -2

123
X0=[-2;-2;-2] Gain de l’observateur L’observateur n’a pas les bonnes C.I. X0=[0;0;0] Gain de la commande
![X0=[-2;-2;-2] Gain de l’observateur. L’observateur n’a pas les bonnes C.I.](http://slideplayer.fr/slide/1167777/3/images/123/X0%3D%5B-2%3B-2%3B-2%5D+Gain+de+l%E2%80%99observateur.+L%E2%80%99observateur+n%E2%80%99a+pas+les+bonnes+C.I..jpg "X0=[0;0;0] Gain de la commande.")
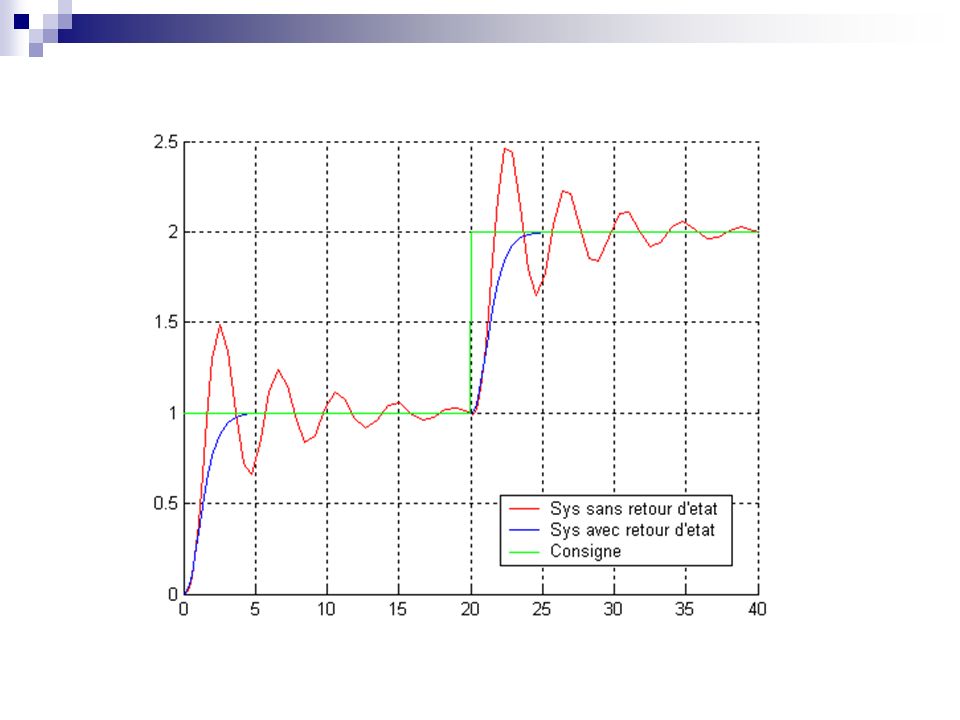
124
C.I. Le système de commande avec retour d’état et observateur répond bien à la contrainte de régulation

125
Conclusion La Commande à retour d’état par placement de pôles (commande modale) est relativement simple dans sa mise en œuvres, mais sur des systèmes complexes d’ordre élevés avec des vecteurs d’états qui ne sont pas toujours physique on arrive à des limites dans sa mise en œuvre. La synthese d’observateur par placement de pôles (observateur modale) est relativement simple dans sa mise en oeuvre, mais sur des systémes complexes d’ordre élevés avec des vecteurs d’état qui ne sont pas toujours physique on arrive à des limites dans sa mise en œuvre. Probléme: Comment choisir la dynamique de l’observateur et celle de la commande en fonction du systeme et du CdC Une solution : Les observateurs du type Kalman + La commande LQ Commande LQG
 est. relativement simple dans sa mise en oeuvre, mais sur des systémes complexes d’ordre élevés avec des vecteurs d’état qui ne sont pas toujours physique on arrive à des limites dans sa mise en œuvre. Probléme: Comment choisir la dynamique de l’observateur et celle de la. commande en fonction du systeme et du CdC. Une solution : Les observateurs du type Kalman + La commande LQ Commande LQG.")
126
Introduction à la commande Optimale
Partie III Commande LQ Observateur optimale Commande LQG

127
Grammien de commandabilité Conclusion
Commande optimale LQ Choix du critère Le problème LQ Propriétés Grammien de commandabilité Conclusion

128
Choix du critère ** Qui dit commande optimale dit critère pour choisir cet optimum ** Le but d’un système de commande est de réaliser : -Le rejet rapide des perturbations (l’état du système converge rapidement vers sont équilibre après une perturbation) -Minimiser l’énergie pour assurer le suivi de consigne et le rejet des perturbations On se trouve donc face à une obligation de compromis entre une convergence rapide et une minimisation de l’énergie de commande
 -Minimiser l’énergie pour assurer le suivi de consigne et le rejet des perturbations. On se trouve donc face à une obligation de compromis entre une convergence. rapide et une minimisation de l’énergie de commande.")
129
Rejet des perturbations
Soit deux systèmes avec la même condition initiale(≠0) on souhaite savoir en combien de temps les systèmes vont retourner a l’équilibre. On constate que On peut donc dire qu’un rejet rapide de perturbation est respecté par la minimisation de
 on souhaite savoir. en combien de temps les systèmes vont retourner a l’équilibre. On constate que. On peut donc dire qu’un rejet rapide de perturbation est respecté par la minimisation. de.")
130
Dans le cas multivariable on défini une matrice de pondération Qc (symétrique définie
non négative). On peut ainsi affecter un poid différent à chaques composantes du vecteur d’état Energie de commande De la même façons on peut évaluer l’énergie de commande par : Dans le cas multivariable on défini une matrice de pondération Rc (symétrique définie positive). On peut ainsi affecter un poids différent à chaques composantes du vecteur de commande
. On peut ainsi affecter un poid différent à chaques composantes du. vecteur d’état. Energie de commande. De la même façons on peut évaluer l’énergie de commande par : Dans le cas multivariable on défini une matrice de pondération Rc (symétrique définie. positive). On peut ainsi affecter un poids différent à chaques composantes du vecteur. de commande.")
131
Critère de compromis Des observations précédentes on peut définir un critère de compromis entre l’énergie de commande et la dynamique du système.

132
Problème LQ Le problème est de calculer la matrice K qui permet de déterminer le retour d’état u(t)=-K.x(t) qui minimise le critère LQ
=-K.x(t) qui minimise le critère LQ.")
133
Une démonstration simple est disponible dans la référence [3]
![Une démonstration simple est disponible dans la référence [3]](http://slideplayer.fr/slide/1167777/3/images/133/Une+d%C3%A9monstration+simple+est+disponible+dans+la+r%C3%A9f%C3%A9rence+%5B3%5D.jpg "Une démonstration simple est disponible dans la référence [3]")
134
Exemple

135
Simulation en régulation y*=0
Rc=1 K= [0.6314 0.9623 0.1231] ; Pôles : i i

136
Rc=1/10 K= [2.7229 4.1529 ] Pôles : i i En diminuant la pondération sur la commande on accélère le système (les pôles du système on été déplacé plus à gauche) mais la valeur de la commande a augmenté.
![Rc=1/10 K= [ ] Pôles : i i.](http://slideplayer.fr/slide/1167777/3/images/136/Rc%3D1%2F10+%EF%83%A0+K%3D+%5B+%5D+P%C3%B4les+%3A+i+i..jpg "En diminuant la pondération sur la commande on accélère le système. (les pôles du système on été déplacé plus à gauche) mais la valeur de la commande a augmenté.")
137
Rc=1/100 [9.6215 6.7703] Pôles : i i En diminuant la pondération sur la commande on accélère le système mais la valeur de la commande a fortement augmenté.
![Rc=1/100 [ ] Pôles : i i.](http://slideplayer.fr/slide/1167777/3/images/137/Rc%3D1%2F100+%EF%83%A0+%5B+%5D+P%C3%B4les+%3A+i+i..jpg "En diminuant la pondération sur la commande on accélère le système mais. la valeur de la commande a fortement augmenté.")
138
On diminue R on accélère le Système
Mais le système de commande est-il robuste ?

139
Analyse de la BO E u(t) y(t) y*(t) x(t) G H - On coupe la boucle F K w(t)
 y(t) y*(t) x(t) G H - On coupe la boucle F K w(t)")
140
Un peu de manipulation algébrique
Un peu ! T’es modeste ! (je rigole) Tu as des précisions historique sur l’équation de Ricatti: D’où elle vient ?
 Tu as des précisions historique sur l’équation de Ricatti: D’où elle vient")
142
Cela signifie que le lieu de Nyquist de la BO reste toujours à l’extérieur du cercle
de rayon 1 centré sur le point critique (-1,0) I -1 R Marge de gain [ ∞] Marge de phase [-60° 60°]
 I. -1. R. Marge de gain [0.5 +∞] Marge de phase [-60° 60°]")
143
Exemple (R=1/10) Nyquist de la commande Le Nyquist de la commande est toujours à l’exterieur du cercle de rayon 1 centré sur le point critique : MM ≥ 1

144
La synthèse LQ si elle nous garantie des propriétés fortes de robustesse,
elle nous impose tout de même le choix des pondérations Qc et Rc qui n’est pas forcement simple. Dans un premier temps : -On peut imposer d’avoir des matrices diagonales pour limiter le nombre de paramètres. -Fixer une matrice à l’identité et faire varier l’autre. Mais dans le cas de système complexe d’ordre important on se retrouve devant le même problème que celui de la commande par placement de pôles. Une solution pour le choix des matrices Qc et Rc a été proposé par Philippe de Larminat : la methode des grammien

145
Grammien de commandabilité
Dans cette approche on réduit le choix des matrices Qc et Rc à un horizon : Tc Tc est l’horizon de commande. A partir de ce choix les matrices Qc et Rc sont définies de la façon suivante : Ce choix permet d’avoir les pôles du système de commande LQ à gauche de la verticale d’abscisse -1/Tc

146
Avec les logiciels : Sous SCILAB Resolution de l’equation de Riccati continue : Fonction : RICC Sous MATLAB Fonction ARE Resolution du probleme LQ : K=lqr(F,G,Q,R)
")
147
Conclusion La synthèse LQ nous offre une solution simple à la réalisation de régulateur à retour d’état avec comme avantage : -De réaliser un compromis entre dynamique et coût énergétique -De garantir des propriétés de stabilité de la boucle de régulation Le choix des matrices de pondération par la méthode des grammien offrent de plus une solution simple pour fixer la dynamique. Mais comme dans le cas du placement de pôles modale les états du système n’étant pas toujours mesurable on doit avoir recours la plupart du temps à l’utilisation d’observateur

148
Observateur optimale Observateur de Kalman Propriétés
Grammien de commandabilité Conclusion

149
Observateur de Kalman

150
On constate que l’observateur ne réalise pas d’estimation des bruits v(t) et w(t)
But On cherche le gain M qui réalise la meilleure estimation de l’état du système C.a.D. minimiser :

151
Une démonstration est disponible dans la référence [2]
![Une démonstration est disponible dans la référence [2]](http://slideplayer.fr/slide/1167777/3/images/151/Une+d%C3%A9monstration+est+disponible+dans+la+r%C3%A9f%C3%A9rence+%5B2%5D.jpg "Une démonstration est disponible dans la référence [2]")
152
Dans le cas de la commande et de l’observation on résout
Remarque : Dans le cas de la commande et de l’observation on résout le même problème mathématique

153
Analyse de la BO E + - u(t)=0 G H F w(t) M
=0 G H F w(t) M")
154
Un peu de manipulation algébrique

155
Cela signifie que le lieu de Nyquist de la BO de l’observateur reste toujours à
l’extérieur du cercle de rayon 1 centre sur le point critique (-1,0) I -1 R Marge de gain [ ∞] Marge de phase [-60° 60°]
 I. -1. R. Marge de gain [0.5 +∞] Marge de phase [-60° 60°]")
156
Exemple

157
Exemple Etats M =[ 1.0025 ] CI Sortie
![Exemple Etats M =[ ] CI Sortie](http://slideplayer.fr/slide/1167777/3/images/157/Exemple+Etats+M+%3D%5B+%5D+CI+Sortie.jpg "Exemple Etats M =[ ] CI Sortie")
158
Nyquist de la BO de l’observateur
Cercle de Rayon 1

159
La synthèse d’un observateur de Kalman si elle nous garantie des propriétés fortes de robustesse nous impose tout de même le choix des pondérations Qo et Ro qui n’est pas forcement simple. Si l’on connaît la nature des bruits qui affecte le système le choix des pondérations est automatique dans le cas contraire on peut : Dans un premier temps : -Imposer d’avoir des matrices diagonales pour limiter le nombre de paramètres. -Fixer une matrice à l’identité et faire varier l’autre. Mais dans le cas de système complexe d’ordre important on se retrouve devant le même problème que celui de la commande par placement de pôles. Une solution pour le choix des matrices Qo et Ro a était proposer par Philippe de Larminat : la methode des grammien d’observabilité

160
Grammien d’observabilité
Dans cette approche on réduit le choix des matrices Qo et Ro à un horizon : To To est l’horizon d’observation. A partir de ce choix les matrices Qo et Ro sont définies de la façon suivante : Ce choix permet d’avoir les pôles de l’observateur à gauche de la verticale d’abscisse -1/To

161
Conclusion L’approche de Kalman nous offre une solution simple et robuste à la synthèse d’observateur avec comme avantage : -De réaliser la meilleure estimation au sens de la minimisation de la variance de l’erreur. -De garantir des propriétés de stabilité de l’observateur. Le choix des matrices de pondération par la méthode des grammien offrent de plus une solution simple pour fixer la dynamique d’observation. Se pose donc maintenant le problème de la robustesse d’un système de commande LQ avec observateur d’état du type Kalman

162
Commande optimale LQG Le problème LQG Limite du LQG LQG/LTR

163
La synthèse d’un système de commande LQG est effectuée conformément au
théorème de séparation ou principe d’équivalence certitude qui stipule que le problème de commande LQG peut être résolu en traitant séparément le problème d’observation optimale et le problème de commande optimale sous-jacents :

165
Exemple

166
Exemple Poursuite Régulation CI

167
Limite du LQG On pourrait penser que : les systèmes de commande LQG possèdent des propriétés de robustesse aussi importantes que celles des systèmes optimaux de commande et d’observation sous-jacents. LQ Robuste Kalman Robuste LQG Robuste ?

168
Analyse du régulateur G F H M + - -K

169
-GK F MH M + - -K M -K F-GK-MH

170
BO + Régulateur Système - Remarque : Dans le cas multivariable on a : Régulateur * Système ≠ Système*Régulateur

171
1/MG On a perdu de la robustesse au niveau de la marge de Gain

172
Cette limitation de la commande LQG a été mis en évidence à la fin des années soixante par Kwakernaak qui a montré que les propriétés de la commande LQ et au FK ne sont pas préservées dans le cas général. Une bonne décennie après, ce problème a été repris par Doyle and Stein qui ont proposé une technique de synthèse des systèmes de commande LQG réalisant un recouvrement du transfert de la boucle ouverte du système de commande LQ ( respectivement du FK) sous-jacent et l’ont baptisé LTR comme Loop Transfer Recovery On a deux possibilites soit on récupère les propriétés de robustesse : -De la commande LQ -De l’observateur de Kalman
 sous-jacent et l’ont baptisé LTR comme Loop Transfer Recovery. On a deux possibilites soit on récupère les propriétés de robustesse : -De la commande LQ. -De l’observateur de Kalman.")
173
LQG/LTR : Recouvrement en Entrée
Synthétiser, dans une premier étape, le correcteur LQ par un choix approprié des pondérations Qc et Rc obéissant aux exigences du cahier des charges. Dans une seconde étape, à partir d’un réglage nominal Qo et Ro du filtre de KALMAN, on augmentera le paramètre q du nouveau réglage : Qo = Qo +qGGT , Ro = Ro jusqu’ à ce que le transfert de boucle K(s)G(s) du correcteur LQG recouvre, sur une bande de fréquence suffisamment large, le transfert de boucle de retour d’ état LQ : Lim K(s)G(s) = −K(pI−F)−1G ∞
G(s) du correcteur LQG recouvre, sur une bande de fréquence suffisamment large, le transfert de boucle de retour d’ état LQ : Lim K(s)G(s) = −K(pI−F)−1G. ∞")
174
q ∞ : Nyquist BO Nyquist de la commande On peut donc retrouver les propriétés de robustesse de la commande LQ

175
LQG/LTR : Recouvrement en Sortie
Synthétiser, dans une premier étape, le correcteur LQ par un choix approprie des pondérations Qc et Rc obéissant aux exigences du cahier des charges. Dans une seconde étape, a partir d’un réglage nominal Qc et Rc, du retour d’état LQ on augmentera le paramètre q du nouveau réglage : Qc = Qc +qHTH , Rc = Rc jusqu’ a ce que le transfert de boucle G(s) K(s) du correcteur LQG recouvre, sur une bande de frequence suffisamment large, le transfert de boucle de l’observateur: Lim G(s) K(s) = −H(pI−F)−1M ∞
 K(s) du correcteur LQG recouvre, sur une bande de frequence suffisamment large, le transfert de boucle de l’observateur: Lim G(s) K(s) = −H(pI−F)−1M. ∞")
176
q ∞ : Nyquist BO Nyquist de l’observateur On peut donc retrouver les propriétés de robustesse de l’observateur

177
Modélisation d’un système
Résumé Modélisation d’un système Commande Modale (Placement de pôles) Observateur Modale (Placement de pôles) Si l’on ne peut mesurer l’état Calcul du gain K de retour d’état de façon Optimale Calcul du gain M de l’observateur de façon Optimale Commande et Observateur Modale Commande LQ Observateur de Kalman Si l’on ne peut mesurer l’état LQG Pas mal comme Graphe de décision. Perte de Robustesse LQG/LTR
 Observateur Modale. (Placement de pôles) Si l’on ne peut mesurer l’état. Calcul du gain K. de retour d’état de. façon Optimale. Calcul du gain M. de l’observateur de. façon Optimale. Commande et Observateur Modale. Commande LQ. Observateur de Kalman. Si l’on ne peut mesurer l’état. LQG. Pas mal comme. Graphe de décision. Perte de Robustesse. LQG/LTR.")
178
Bibliographie (par ordre alphabetique)
Daniel Alazard : [1] Regulation LQ/LQG (note de cours de SUPAERO) [2] Introduction au filtre de Kalman: Benoît Bergeon : [3] Commande linéaire des systèmes multivariables Philippe de Larminat : [4] Automatique, Commande des systèmes Linéaires, HERMES-LAVOISIER Mohammed M’Saad : [5] Commande Optimale : une introduction (note de cours de l’ENSICAEN)
 [2] Introduction au filtre de Kalman: Benoît Bergeon : [3] Commande linéaire des systèmes multivariables. Philippe de Larminat : [4] Automatique, Commande des systèmes Linéaires, HERMES-LAVOISIER. Mohammed M’Saad : [5] Commande Optimale : une introduction. (note de cours de l’ENSICAEN)")
Présentations similaires





 Formalisme Quantique>")
 Consolidation: tester les connaissances acquises 1 Etude de la commande du système.>")













