Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Tx = Translation sur l’axe des x
Rx = Rotation autour de l’axe des x Ty = Translation sur l’axe des y Ry = Rotation autour de l’axe des y Z O Y X Rx Tx Ty Ry Tz Rz Tz = Translation sur l’axe des z Rz = Rotation autour de l’axe des z

2
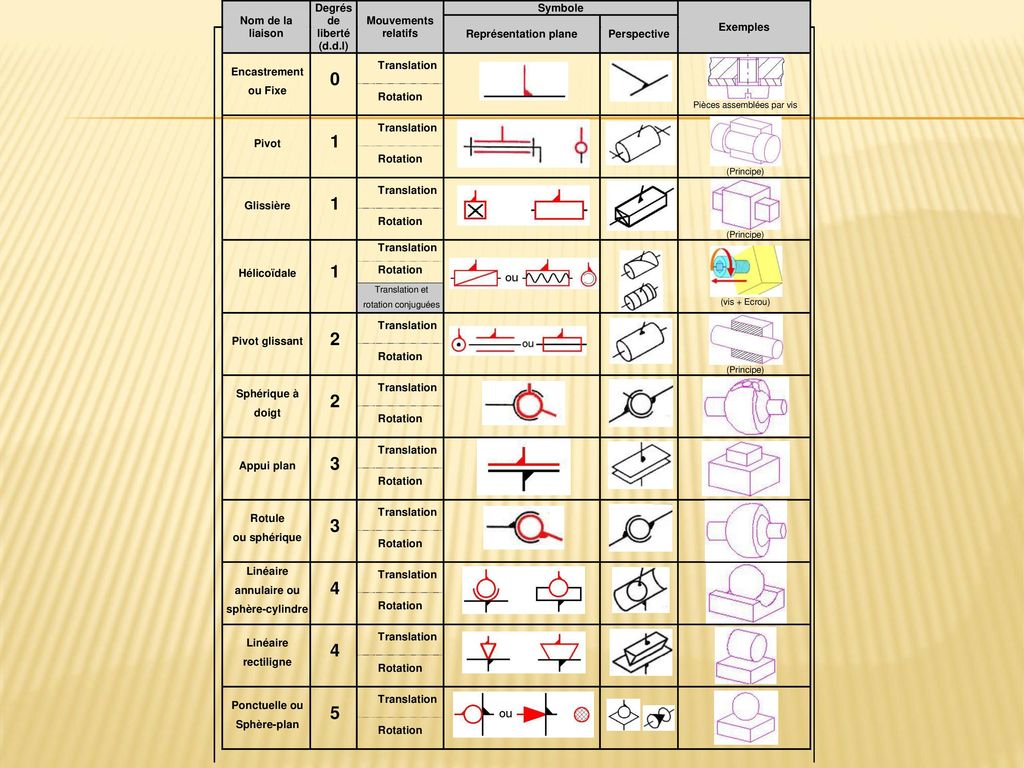
Il existe donc 6 mouvements
3 translations et 3 rotations qui sont les degrés de liberté. Ces mouvements peuvent se faire dans les 2 sens ou peuvent être combinés.

3
En résumé, on définie le mouvement d’un solide S1
par rapport à un solide S2 dans un repère R(x,y,z) de la manière suivante : Lorsque le mouvement est possible, il est noté 1, si le mouvement n’est pas possible, il est noté 0. T R /x Tx Rx Mouvement de S1/S2 = /y Ty Ry /z Tz Rz
 de la manière suivante : Lorsque le mouvement est possible, il est noté 1, si le mouvement n’est pas possible, il est noté 0. T. R. /x. Tx. Rx. Mouvement de S1/S2 = /y. Ty. Ry. /z. Tz. Rz.")
4
Solide 1 : Porte et Solide 2 :Bati
Liaison Porte / Mur : Solide 1 : Porte et Solide 2 :Bati z y x T R /x /y /z 1 Mouvement de S1/S2 = Liaison PIVOT d’axe

5
Solide 1 : Crayon et Solide 2 :feuille
Liaison Crayon / Papier : Solide 1 : Crayon et Solide 2 :feuille z T R /x 1 /y /z y Mouvement de S1/S2 = x Liaison PONCTUELLE de normale

6
Solide 1 : vis et Solide 2 :support goulot
Liaison Vis / Support goulot : Solide 1 : vis et Solide 2 :support goulot z y T R /x /y /z 1 x Mouvement de S1/S2 = Liaison HELICOIDALE REMARQUE : la translation Tz est fonction de la rotation Rz

7
Solide 1 : Boule et Solide 2 :Goulotte jeu
Liaison Boule / Goulotte : Solide 1 : Boule et Solide 2 :Goulotte jeu z y T R /x 1 /y /z x Mouvement de S1/S2 = Liaison LINEAIRE ANNULAIRE d’axe

8
Solide 1 : souris et Solide 2 :tapi
Liaison Souris / Tapi : Solide 1 : souris et Solide 2 :tapi z T R /x 1 /y /z Mouvement de S1/S2 = y x Liaison APPUI PLAN de normale

9
Solide 1 : raclette et Solide 2 :Ecran téléphone
Liaison Raclette / Ecran téléphone : Solide 1 : raclette et Solide 2 :Ecran téléphone z T R /x 1 /y /z Mouvement de S1/S2 = y x Liaison LINEAIRE RECTILIGNE de normale

10
Solide 1 : Pied éolienne et Solide 2 :Radier
Liaison Pied / Sol : Solide 1 : Pied éolienne et Solide 2 :Radier z T R /x /y /z Mouvement de S1/S2 = y x Liaison ENCASTREMENT

11
Solide 1 : Ventouse et Solide 2 : Support GPS
Liaison Ventouse / Support GPS : Solide 1 : Ventouse et Solide 2 : Support GPS z T R /x 1 /y /z y Mouvement de S1/S2 = x Liaison ROTULE DE CENTRE ʺOʺ

12
Solide 1 : Tiroir et Solide 2 : Bureau
Liaison Tiroir / Bureau : Solide 1 : Tiroir et Solide 2 : Bureau z y T R /x /y 1 /z x Mouvement de S1/S2 = Liaison glissière d’axe

13
Solide 1 : Axe et Solide 2 : Support de cabotins
Liaison Axe / Support de cabotins : Solide 1 : Axe et Solide 2 : Support de cabotins z y T R /x 1 /y /z Mouvement de S1/S2 = x Liaison glissière PIVOT GLISSANT d’axe

15
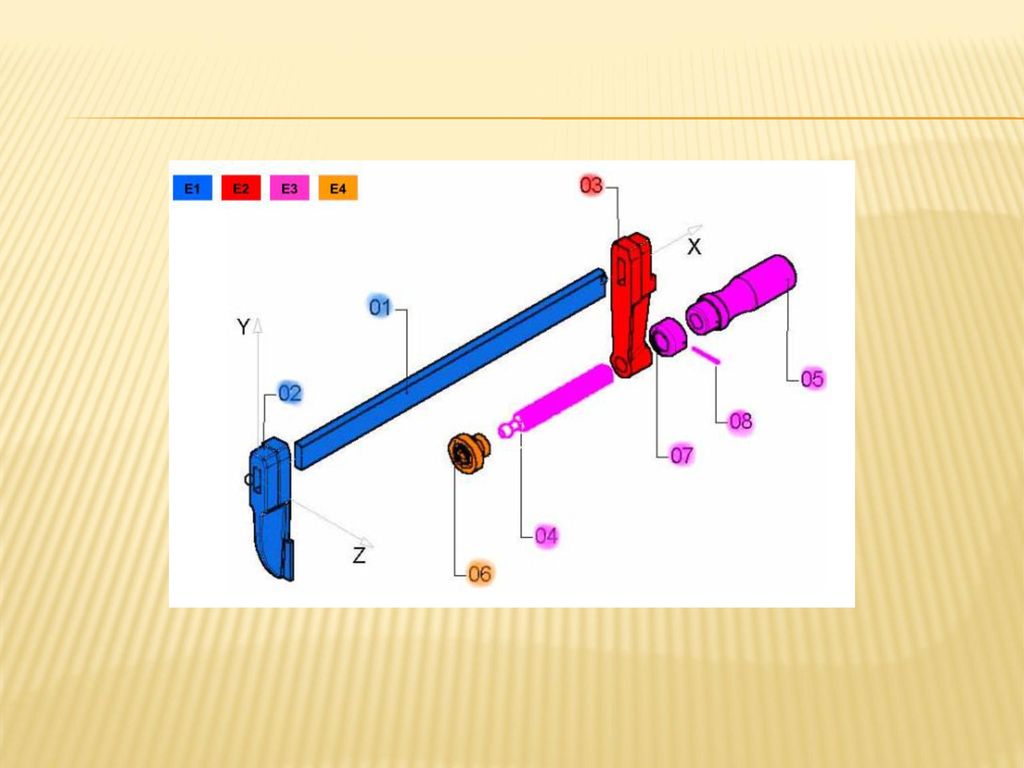
Mouvements possibles sur le serre joint à pompe
Serre joint à pompe pour montage Mouvements possibles sur le serre joint à pompe

16
Désignation Matière 01 1 Corps acier 02 Touche fixe 03 Coulisseau 04
Rep Nbres Désignation Matière 01 1 Corps acier 02 Touche fixe 03 Coulisseau 04 Tige filetée 05 Poignée plastique 06 Touche mobile 07 Cache 08 Goupille

17
Positionnement des axes

18
E1 = (1, 2) Existe-t-il un mouvement de 03 par rapport à 01 ?_OUI
Classe d’équivalence E1 lié à la pièce ʺ01ʺ Existe-t-il un mouvement de 02 par rapport à 01 ?_NON Existe-t-il un mouvement de 03 par rapport à 01 ?_OUI Existe-t-il un mouvement de 04 par rapport à 01 ? _OUI Existe-t-il un mouvement de 05 par rapport à 01 ? _OUI Existe-t-il un mouvement de 06 par rapport à 01 ? _OUI Existe-t-il un mouvement de 07 par rapport à 01 ? _OUI Existe-t-il un mouvement de 08 par rapport à 01 ? _OUI E1 = (1, 2)
")
19
Classe d’équivalence E2 lié à la pièce ʺ3ʺ
Existe-t-il un mouvement de 4 par rapport à 3 ? _OUI Existe-t-il un mouvement de 5 par rapport à 3 ? _OUI Existe-t-il un mouvement de 6 par rapport à 3 ? _OUI Existe-t-il un mouvement de 7 par rapport à 3 ? _OUI Existe-t-il un mouvement de 8 par rapport à 3 ? _OUI E2 = ( 3 ) Classe d’équivalence E3 lié à la pièce ʺ4ʺ Existe-t-il un mouvement de 5 par rapport à 4 ?_NON Existe-t-il un mouvement de 6 par rapport à 4 ?_OUI Existe-t-il un mouvement de 7 par rapport à 4 ?_NON Existe-t-il un mouvement de 8 par rapport à 4 ?_NON E3= ( 4, 5, 7, 8 ) E4 = ( 6 )
 Classe d’équivalence E3 lié à la pièce ʺ4ʺ. Existe-t-il un mouvement de 5 par rapport à 4 _NON. Existe-t-il un mouvement de 6 par rapport à 4 _OUI. Existe-t-il un mouvement de 7 par rapport à 4 _NON. Existe-t-il un mouvement de 8 par rapport à 4 _NON. E3= ( 4, 5, 7, 8 ) E4 = ( 6 )")
21
Nature des surfaces de contact (cylindrique, plane, …)
Repère de la liaison Nature des surfaces de contact (cylindrique, plane, …) Translation suivant l'axe Rotation suivant l'axe Nom, centre et axe de la liaison X Y Z Entre E1 et E2 L12 Plan de normale Ay + Plan de normale Az 1 Nom de la liaison GLISSIERE Centre A Axe Ax E2 et E3 L23 Filetage/taraudage d’axe Bx HELICOIDALE Centre B Axe Bx E3 et E4 L34 Surface sphérique de centre C SPHERIQUE ou ROTULE Centre C
 Translation suivant l axe. Rotation suivant l axe. Nom, centre et axe de la liaison. X. Y. Z. Entre. E1 et E2. L12. Plan de normale Ay + Plan de normale Az. 1. Nom de la liaison. GLISSIERE. Centre A Axe Ax. E2 et E3. L23. Filetage/taraudage d’axe Bx. HELICOIDALE. Centre B Axe Bx. E3 et E4. L34. Surface sphérique de centre C. SPHERIQUE ou ROTULE. Centre C.")
22
Graphe des liaisons E1 E2 E3 E4 GLISSIERE (A , Ax)
HELICOIDALE (B , Bx) ROTULE (C)
 ROTULE (C)")
23
Schéma cinématique X Z Y E2 A C B E1 E3 E4

24
BARRIERE DE PARKING Parking fermé parking fermé réservé

Présentations similaires













 provoque le pivotement du levier bleu qui vient bloquer la pièce orange (positionnée.>")






