Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Schéma Cinématique

2
Les systèmes techniques que nous étudions sont des ensembles structurés de composants. Ils répondent à un besoin. Le réel étant toujours très complexe, si on veut étudier ou concevoir un mécanisme, le soucis du technicien sera d’élaborer une Les modèles très complexes sont soumis à un traitement mathématique. La théorie des mécanismes est le premier maillon d’une CAO. modélisation.

3
1-Définition d’un solide.
Un solide est un corps qui ne s’adapte pas directement au contenant. (¹ liquide, gaz, poudre, etc..) Exemples de solides :bielle, tôle, piston… Contre-exemples de solides : eau, poudre, huile, argon.
 Exemples de solides :bielle, tôle, piston… Contre-exemples de solides : eau, poudre, huile, argon.")
4
2-Modélisation du solide en cinématique, statique et dynamique.
On utilisera un modèle de solide indéformable : on considère que pour tous couples de points du solide, la distance entre ces points ne varie pas par rapport au temps. MN =constante / temps. Attention : ceci est un modèle. En toute rigueur un solide n’est jamais indéformable.

5
Le Schéma cinématique. Le schéma cinématique d'un mécanisme est une figure plane ou spatiale qui permet - D'aider à la compréhension du fonctionnement du mécanisme ; - De mener des études géométriques et cinématiques.

6
Réalisation du schéma cinématique:
-Recenser les classes d’équivalence du mécanisme ; -Établir le graphe des liaisons; -Modéliser les liaisons entre ces classes d'équivalence; -Représenter les liaisons et les classes d'équivalence en utilisant les symboles normalisés -Tenir compte des particularités du mécanisme (axes parallèles, perpendiculaires ou concourants, position relative des liaisons…). Le schéma doit être fait pour une position quelconque du mécanisme.
. Le schéma doit être fait pour une position quelconque du mécanisme.")
7
Classe d’équivalence 1-Définition. Une classe d’équivalence cinématique est un ensemble de pièces d’un mécanisme qui n’ont aucun mouvement relatif entre elles. Ces solides sont en liaison encastrement. En phase de fonctionnement normal, de maintenance, de réglage, …, un mécanisme peut avoir des sous ensembles fonctionnels différents.

8
L'ensemble des classes d'équivalence d'un mécanisme doit être représentatif de celui-ci.
Toutefois, les éléments d'assemblage (vis, écrou, clavette, goupille,...), les pièces déformables (ressorts,...),les éléments de roulements, ..., ne sont en général, pas pris en compte. Dans un schéma cinématique les classes d’équivalences sont représentées en filaire.
, les pièces déformables (ressorts,...),les éléments de roulements, ..., ne sont en général, pas pris en compte. Dans un schéma cinématique les classes d’équivalences sont représentées en filaire.")
9
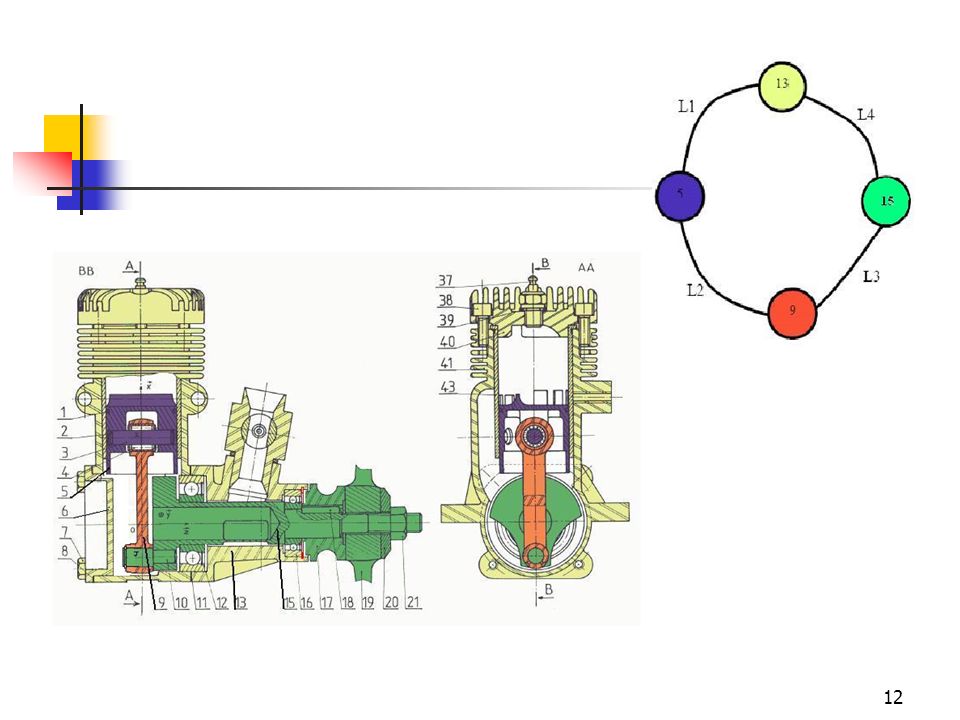
2-Recherche des classes d’équivalence d’un mécanisme à partir du dessin d’ensemble.
La mise en évidence des différentes classes d’équivalence peut être réalisée en coloriant le dessin d’ensemble.

10
Le nom des classes d’équivalence sera celui de la pièce principale.

11
Graphe des liaisons. 1-Définition Le graphe des liaisons est une figure qui recense les classes d’équivalence et les liaisons entre ces classes. L'ensemble forme la chaîne cinématique. Cette représentation est l'outil fondamental à toute étude cinématique et statique. Les classes d’équivalence sont représentées par des ronds. Les traits entres ces ronds schématisent les liaisons (d’où le terme de chaîne de solides). Il est judicieux de placer les groupes en respectant la "structure géographique" du mécanisme. Une liaison existe chaque fois que deux classes d’équivalence ont des surfaces directement en contact ou par l’intermédiaire d’éléments roulants (billes ou rouleaux).
. Il est judicieux de placer les groupes en respectant la structure géographique du mécanisme. Une liaison existe chaque fois que deux classes d’équivalence ont des surfaces directement en. contact ou par l’intermédiaire d’éléments roulants (billes ou rouleaux).")
13
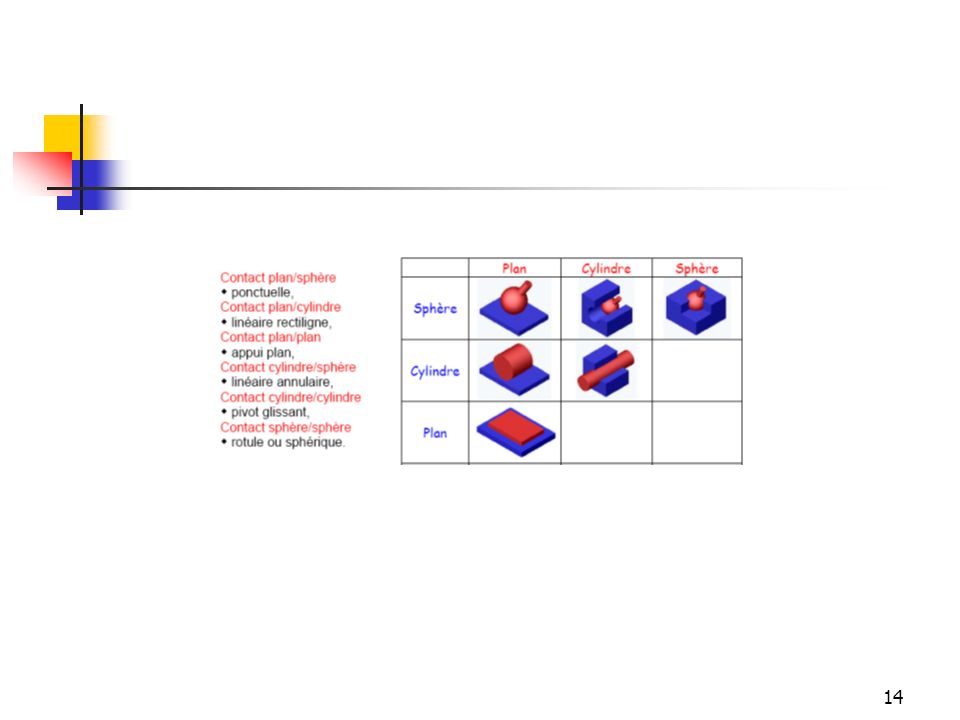
Liaisons mécaniques 1-liaisons élémentaires Une liaison élémentaire entre deux solides S1 et S2 est obtenue à partir du contact d'une surface géométrique élémentaire liée à S1 sur une surface géométrique élémentaire liée à S2. Les surfaces géométriques élémentaires ou économiquement réalisables obtenues à partir des principaux procédés d'usinage sont le plan, le cylindre et la sphère.

15
2-Liaisons composées Une liaison composée est obtenue par association cohérente de liaisons élémentaires. glissière Pivot

16
4-Les liaisons parfaites.
Le modèle de liaison parfaite repose sur les hypothèses suivantes: Les surfaces de contact de chacune des pièces sont supposées géométriquement parfaites et le maintien du contact est toujours assuré. - Les liaisons sont sans jeu. - Le contact entre les deux pièces s’établit en un point, sur une portion de ligne (droite ou cercle) ou sur une portion de surface (plan, cylindre, sphère, surface de révolution, surface hélicoïdale) - Les liaisons sont sans frottement.
 ou sur une portion de surface (plan, cylindre, sphère, surface de révolution, surface hélicoïdale) - Les liaisons sont sans frottement.")
17
5-Degré de liberté. Les degrés de liberté d'une liaison entre deux solides S1 et S2 correspondent aux mouvements relatifs indépendants autorisés au sein de cette liaison entre S1 et S2. 6 mouvements élémentaires possibles d'un solide dans l'espace rapporté à un repère(A,x,y,z). -3 translations : Tx, Ty, Tz, -3 rotations : Rx, Ry, Rz.
. -3 translations : Tx, Ty, Tz, -3 rotations : Rx, Ry, Rz.")
18
6-Repère local En général, le repère local associé à un contact entre deux solides n'appartient à aucun des deux solides. De plus, l'origine sera plutôt placée en un point caractéristique du contact et les vecteurs directeurs de sa base correspondent dans la mesure du possible à des axes de symétrie, de révolution, ... Enfin, il sera choisi de sorte que les mouvements élémentaires soient indépendants.

19
7-Les degrés de liberté d’une liaison ou mobilité.
Le nombre de degrés de liberté (mobilité) d’une liaison est le nombre de mouvements élémentaires indépendants que la liaison autorise (nbre de rotation et de translation). Pour les recenser, il faut introduire un repère local qui utilise les particularités de la liaison. Exemple : liaison pivot-glissant
 d’une liaison est le nombre de mouvements élémentaires indépendants que la liaison autorise (nbre de rotation et de translation). Pour les recenser, il faut introduire un repère local qui utilise les particularités de la liaison. Exemple : liaison pivot-glissant.")
20
8-Tableau des liaisons usuelles

21
1 Tx

22
1 Rx

23
2 Tx Rx

24
1 Ty

25
3 Tx Ty Rz

26
3 Rx Ry Rz

27
2 Ry Rz

28
4 Tx Rx Ry Rz

29
4 Tx Ty Rx Rz

30
5 Tx Ty Rx Ry Rz

31
Entre 9 et 15 A

32
- Les surfaces de contact entre les classes
d’équivalence 9 et 15 sont des cylindres de révolution : la longueur du contact est grande devant le diamètre. Il y a arrêt en translation : anneau élastique et épaulement. On retient donc une liaison Pivot en A d’axe x . PIVOT en A d’axe x

33
Dans le graphe de liaison, il faut seulement considérer la liaison qu’ils y a entre deux classes d’équivalence indépendamment des autres liaisons existantes.

34
Entre 5 et 13 B

35
PIVT GLISSANT en B d’axe y - Les surfaces de contact entre les classes d’équivalence 5 et 13 sont des cylindres de révolution. On retient donc une liaison pivot glissant en B d’axe y.

36
Entre 13 et 15 C D

37
PIVOT en C d’axe x - La classe d’équivalence 15 est guidée par rapport à 13 par l’intermédiaire de deux roulements à billes : Si on décompose chaque liaison réalisée par un roulement : Nous avons à gauche une linéaire annulaire en C et d’axe x et à droite une rotule de centre D. Si on regarde globalement la liaison nous avons une pivot en C ou D d’axe x. C’est la liaison équivalente.

38
Un schéma architectural est un schéma qui tient compte des liaisons élémentaires
Il s’intéresse à la réalisation cinématique des liaisons Un schéma cinématique est un schéma qui tient compte des liaisons équivalentes. Il met en évidence les mouvements des classes d’équivalence.

39
Entre 9 et 5 B

40
- La classe d’équivalence 9 est guidée par
rapport à 5 par l’intermédiaire d’un roulement à aiguilles qui réalise une liaison linéaire annulaire en B d’axe x. LINEAIRE ANNULAIRE en B d’axe x

41
PIVOT en C d’axe x PIVOT GLISSANT en B d’axe y PIVOT en A d’axe x LINEAIRE ANNULAIRE en B d’axe x

42
schéma cinématique B C ou D A

43
schéma cinématique B A C ou D

44
Schéma architectural B A C D

45
Remarque concernant les roulements:

46
Nouvelle norme de représentation des liaisons:

48
Ce qu’il faut retenir: La méthode de représentation d’un schéma cinématique La représentation normalisée des liaisons, 2D, 3D, point et repère. Ce qu’est un schéma architectural et un schéma cinématique

Présentations similaires