Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Le filtrage d’images

2
Objectifs du filtrage

3
Nomenclature

4
Nomenclature

5
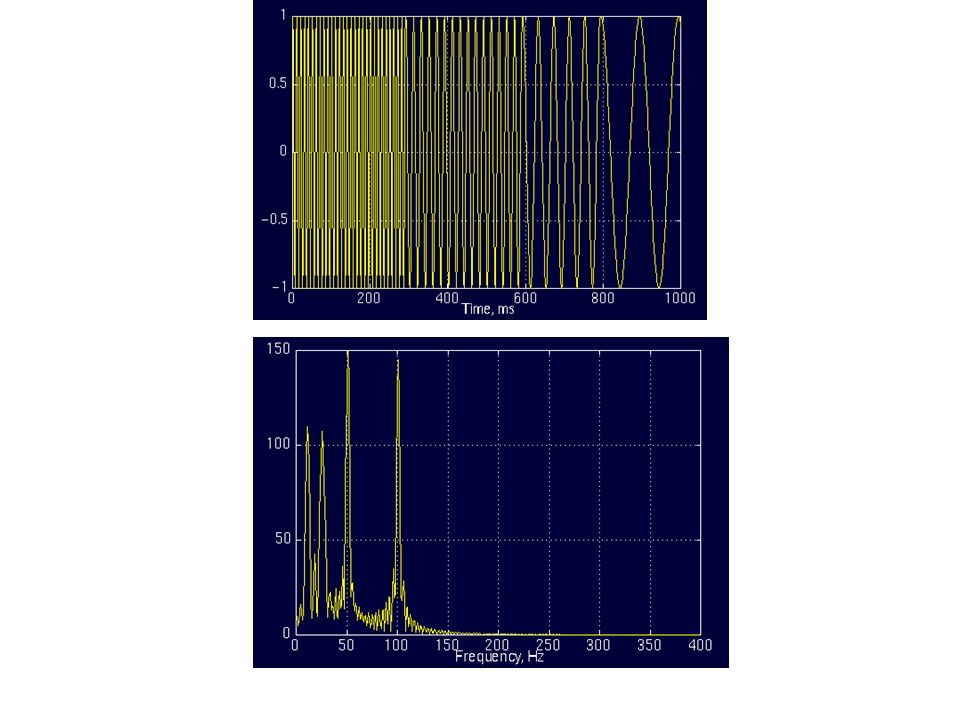
Les fréquences spatiales

6
Catégories Filtres dans le domaine spatial
Filtres dans un autre domaine que le spatial (ex. domaine des fréquences) Filtres morphologiques
 Filtres morphologiques.")
7
Filtres dans le domaine spatial
Voisinage 8 Voisinage 4 Filtres de lissage (passe bas) Filtres de détection d’arêtes (passe haut) Filtres de détection de lignes/de points
 Filtres de détection d’arêtes (passe haut) Filtres de détection de lignes/de points.")
8
Filtres de lissage (passe bas) Application majeure: nettoyage du bruit aléatoire
Filtres linéaires: moyenneur, gaussien Filtres non-linéaires: ex. médian, divers filtres dits adaptatifs

9
Hypothèse de base: une valeur qui diffère beaucoup des valeurs de son voisinage immédiat c’est le plus souvent du bruit Prendre en compte les valeurs de tendance centrale dans le voisinage, aide à supprimer le bruit.

10
(masques de convolution)
Filtres linéaires (masques de convolution)
")
11
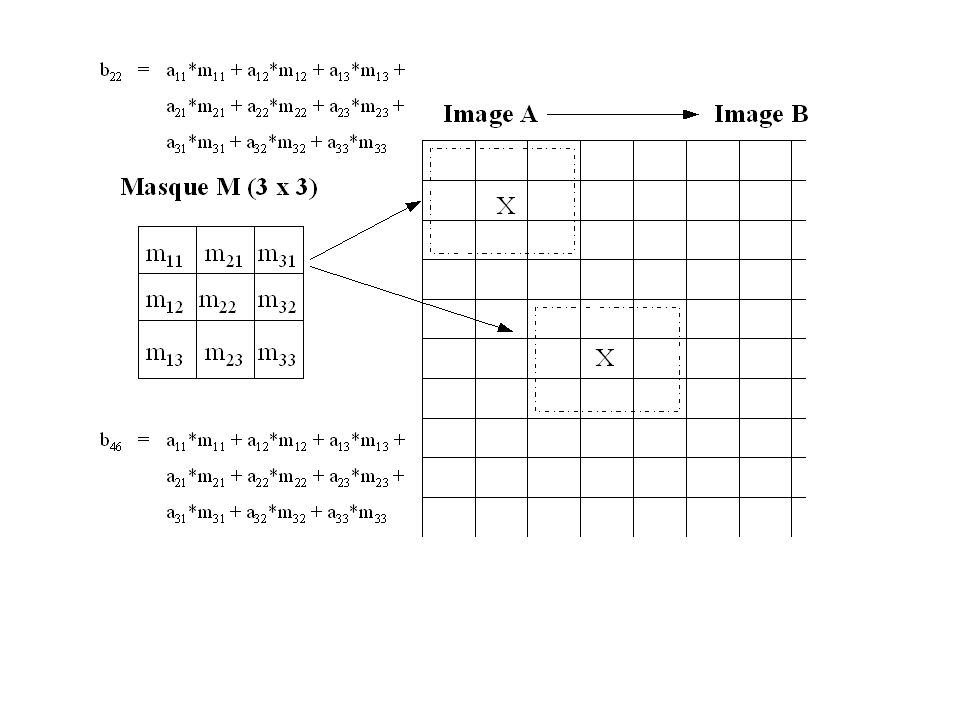
Filtre de convolution spatiale

13
Filtres linéaires N=arrondi (2*σ2+1) σ2 = 3
 σ2 = 3")
14
Filtres linéaires Uniforme Triangulaire (b) Filtre circulaire (R=2.5)
a) Filtre rectangulaire (J=K=5) Triangulaire a) Filtre pyramidal (J=K=5) a) Filtre conique (R=2.5)
 Filtre rectangulaire (J=K=5) Triangulaire. a) Filtre pyramidal (J=K=5) a) Filtre conique (R=2.5)")
15
Filtres non linéaires - Médian - Adaptatif
La valeur du pixel central est remplacée par la moyenne de la sous-région avec la variance minimale

16
Ok. mais je rends l’image floue en même temps…. Pourquoi
Ok ! mais je rends l’image floue en même temps…. Pourquoi? Parce qu’on réduit l’amplitude des arêtes, les contrastes entre objets…. Alors….

17
Cherche à ajuster l’action du filtre, dote le avec un peu d’intelligence, de finesse…Faits le comprendre qu’il y a une arête ou une cible importante dans le voisinage du pixel ….
![]()
18
Filtre adaptatif de Nagao
Remplace le pixel central par la moyenne de l’opérateur avec la plus faible variance

19
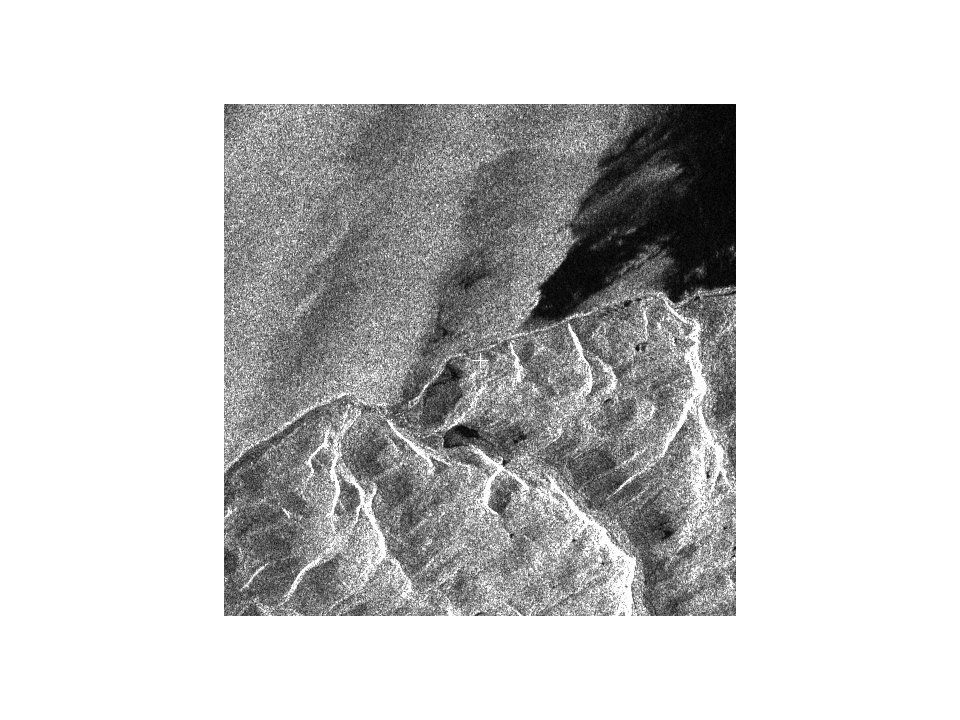
Exemple: bruit dû au scannage des photos

20
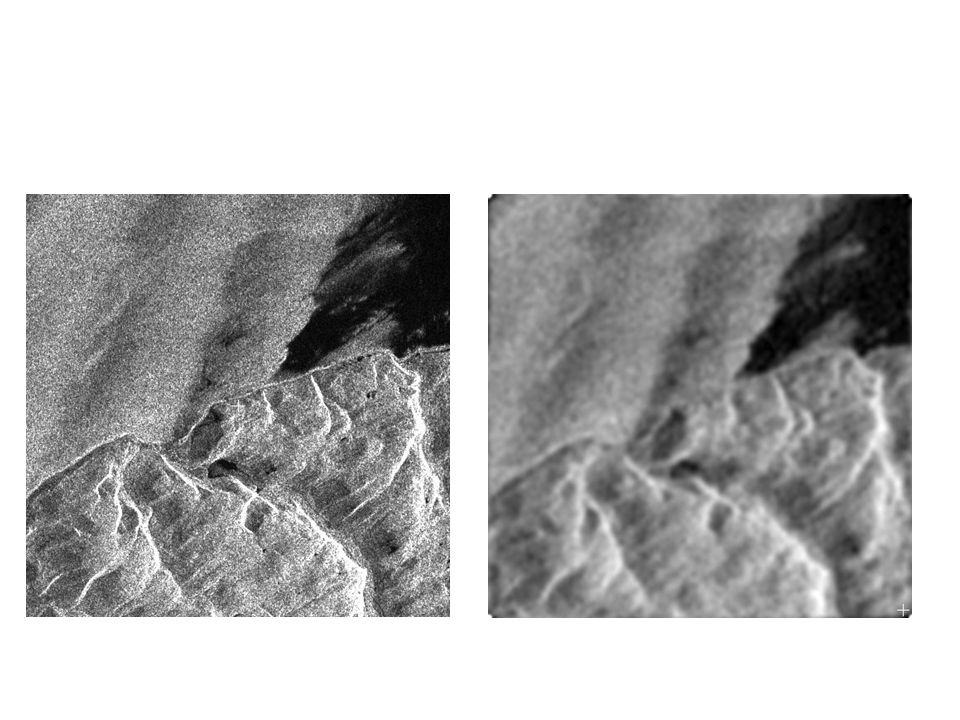
Image originale Image originale lissée par filtre gaussien Image originale lissée par filtre adaptatif L’histogramme de l’image montre que des valeurs aberrantes ont été introduites lors de la production de l’orthophotographie. Ces valeurs ont une distribution uniforme dans l’ensemble de l’échelle des niveaux de gris. Le filtre gaussien 5x5 réduit significativement le bruit mais en même temps baisse l’amplitude des arêtes rendant l’image « floue ». Le filtre a été appliquée 2 fois pour comparer le résultat avec le filtre adaptatif. Le filtre adaptatif des Nagao et Matsuyame après deux itérations. Le bruit est significativement réduit et le contraste entre les objets bien préservé.

21
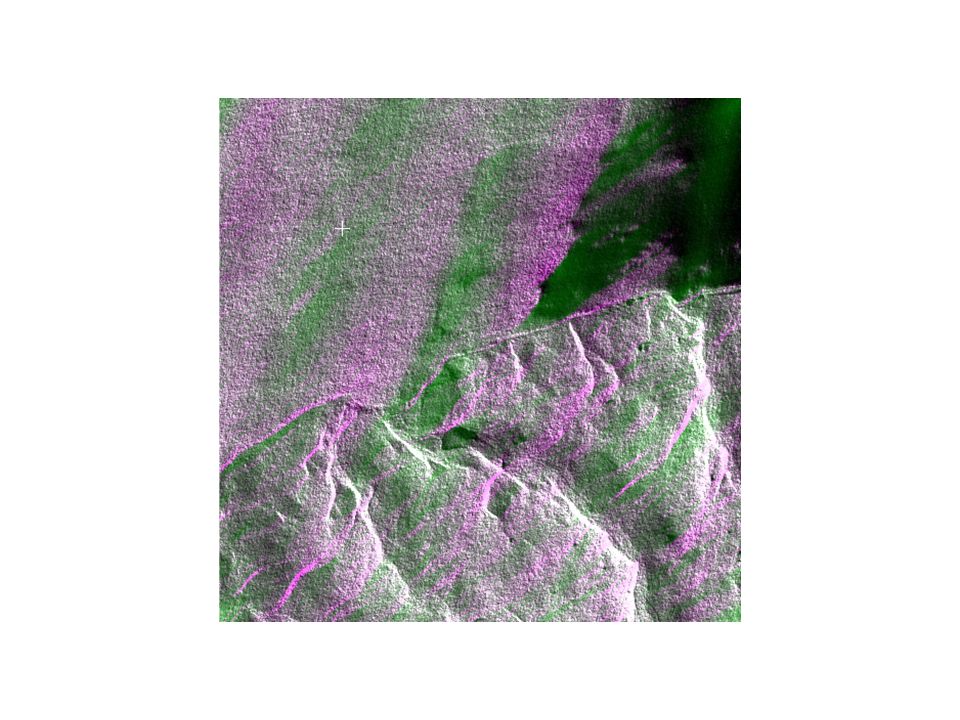
Détail (zoom 2X)
")
22
Les filtres adaptatifs

23
Filtre de détection d’arêtes/de lignes
Gradient Autres

24
Arête: notion fondamentale
Les arêtes sont des zones de quelques pixels de large marquant une transition entre deux régions homogènes de brillance ou de texture différente

25
Lignes : Définition dépend de l’échelle de travail
Les lignes sont des zones de peu de pixels de large entre deux arêtes en proximité physique

26
Points (spots): Définition dépend de l’échelle de travail
Variation très localisée de la brillance de l’image

27
Test: trouvons arêtes, lignes, points

28
Gradient

29
Sy Sx= c) Magnitude et angle d’orientation du gradient
a) La somme des différences dans la direction des colonnes nous donne la composante gx du gradient. Le signe de la différence est utilisé pour calculer l’angle d’orientation du gradient (schéma c). Dans cet exemple cette somme équivaut à +8VN b) La somme des différences dans la direction des lignes nous donne la composante gy du gradient. Le signe de la différence est utilisé pour calculer l’angle d’orientation du gradient (schéma c). Dans cet exemple cette somme équivaut à –7VN Dans cet exemple la magnitude est égale à environ 11VN. Compte tenu des signes des composantes le gradient est orientée sud-est. L’angle est environ 3190
 La somme des différences dans la direction des colonnes nous donne la composante gx du gradient. Le signe de la différence est utilisé pour calculer l’angle d’orientation du gradient (schéma c). Dans cet exemple cette somme équivaut à +8VN. b) La somme des différences dans la direction des lignes nous donne la composante gy du gradient. Le signe de la différence est utilisé pour calculer l’angle d’orientation du gradient (schéma c). Dans cet exemple cette somme équivaut à –7VN. Dans cet exemple la magnitude est égale à environ 11VN. Compte tenu des signes des composantes le gradient est orientée sud-est. L’angle est environ")
30
Image SPOT-MSP (bande PIR)
Magnitude du gradient selon les masques de Sobel Angle d’orientation du gradient, plus la valeur est brillante plus l’angle approche les 3600.

31
KIRCH Est: Nord-Est: Nord : Nord-Ouest
Le facteur de normalisation de chacun des masques est 1/15 Ouest: Sud-Ouest: Sud: Sud-Est:

32
(a) une arête en échelon
(b) dérivée première de la fonction image (c) dérivée seconde de la fonction image
 dérivée première de la fonction image. (c) dérivée seconde de la fonction image.")
33
Image originale Points d’inflexion des arêtes après application d’un filtre laplacien (voir texte); la brillance varie en fonction de l’amplitude des arêtes (logiciel PCI).
; la brillance varie en fonction de l’amplitude des arêtes (logiciel PCI).")
34
Passages par zéro: algorithme de Marr

35
Le facteur de normalisation est 1/42.

37
Le facteur de normalisation est 1/42.
Max des 4 filtres

38
Détection de points

39
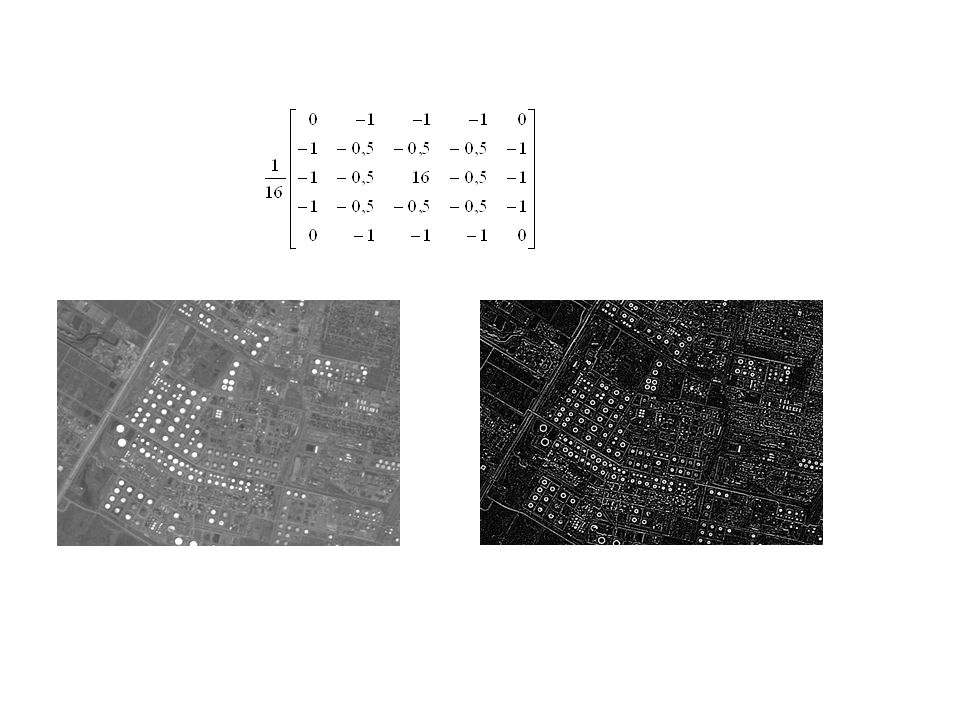
Le rehaussement d’arêtes
Masques de convolution Rehaussement spéciaux

40
Le rehaussement d’arêtes
Masques de convolution

41
Masques de convolution
Image originale: sans étirement; étirement linéaire; étirement r.carrée Réh. d’arêtes: sans étirement; étirement linéaire; étirement r.carrée

42
Le rehaussement d’arêtes
2. Rehaussements spéciaux: rehaussement par soustraction d’une image lissée

43
Rehaussements spéciaux
Image originale Image lissée (9x9 gaussien) Soustraction (c=0.6)
 Soustraction (c=0.6)")
44
Catégories Filtres dans le domaine spatial
Filtres dans un autre domaine que le spatial (ex. domaine des fréquences) Filtres morphologiques
 Filtres morphologiques.")
45
Un tour de magie????

46
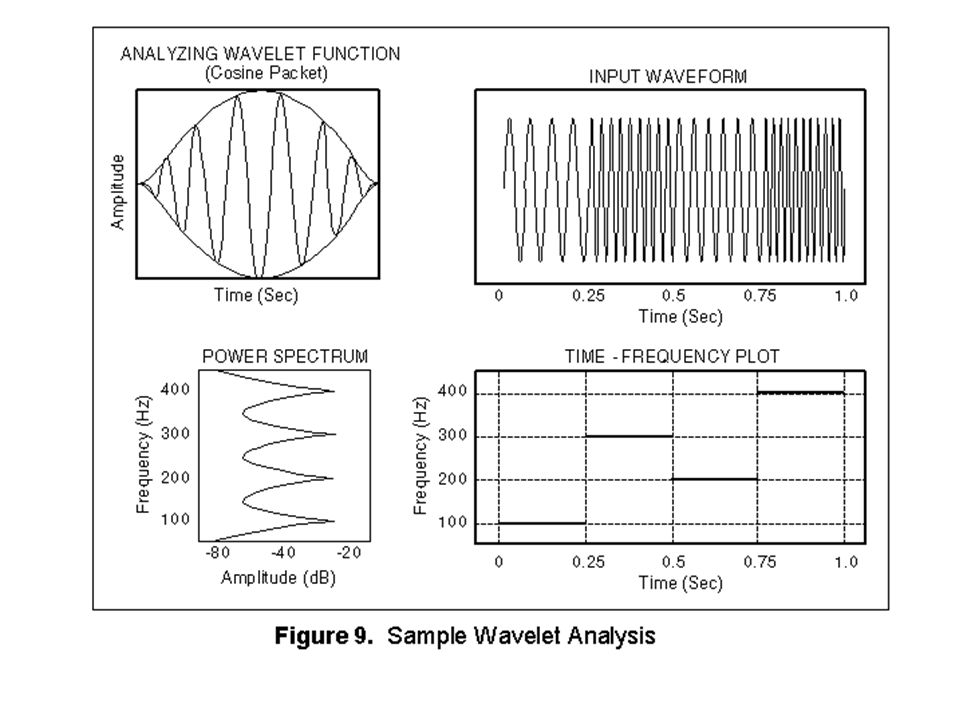
La théorie du signal

47
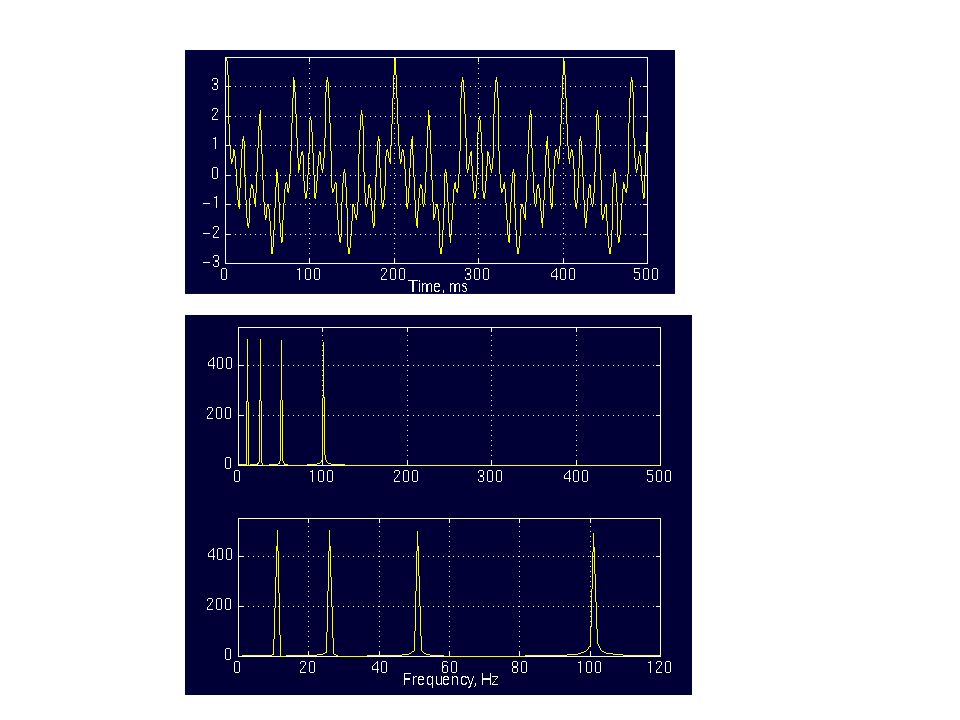
Un exemple simple

48
Un exemple simple

49
.

50
.

51
Un exemple simple

52
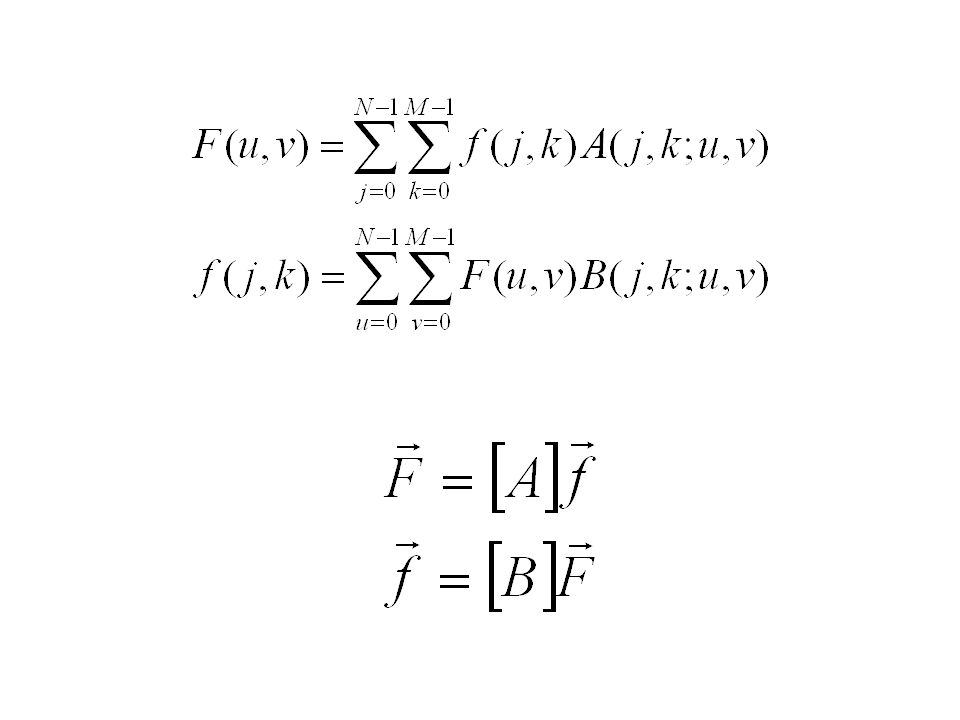
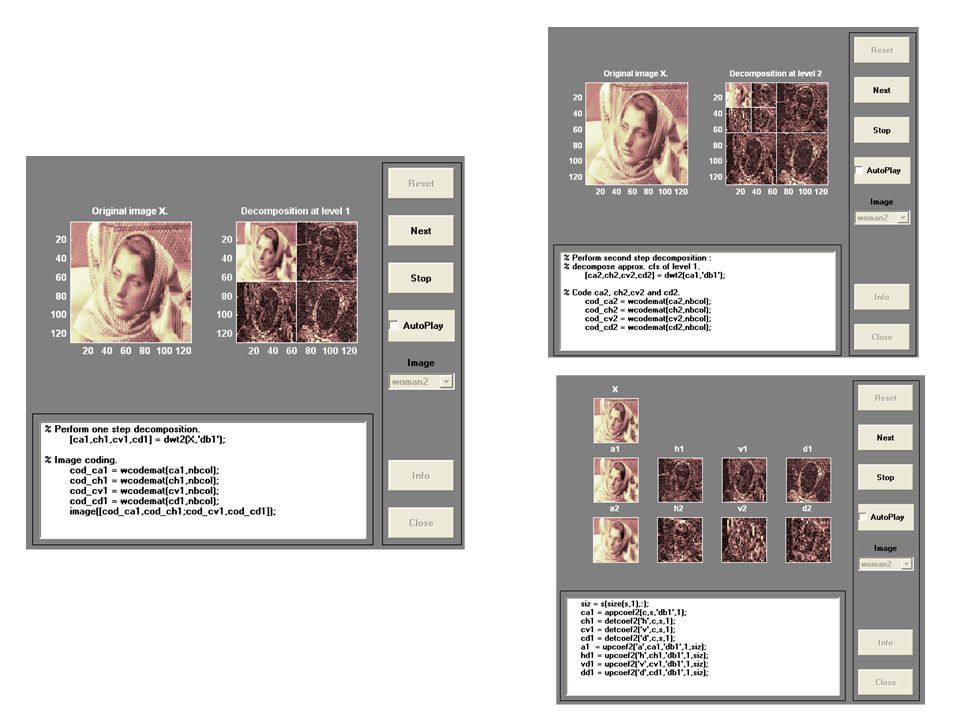
Transformées unitaires 2-D

54
Unitaire La matrice A est unitaire
Une matrice A réel unitaire est orthogonale:

55
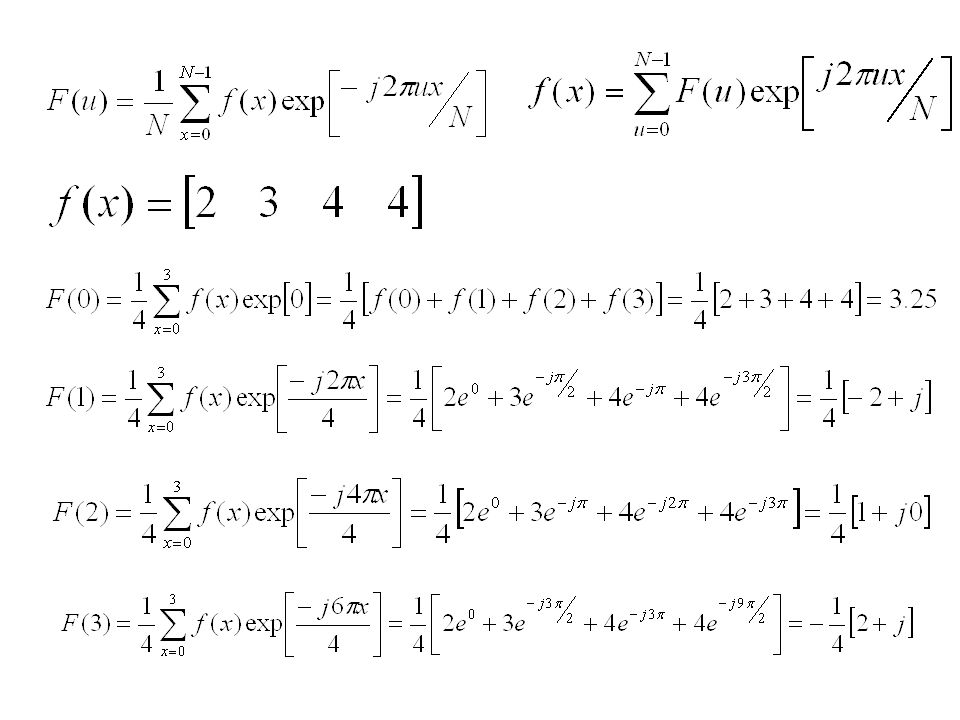
Fourier (image carrée NxN)
Exemple

57
Un exemple

58
FFT – partie réelle/partie imaginaire

59
FFT – partie magnitude/phase

60
Filtrage – PCI MASQUE UTILISATEUR
Butterworth (passe bas ou passe haut) Gaussien (pb ou ph) FRÉQUENCE DE COUPURE
 Gaussien (pb ou ph) FRÉQUENCE DE COUPURE.")
61
FFT – filtre wedge

62
FFT-inverse

65
Filtre passe-bas Gaussien (FC=0,0625)
")
67
Filtre passe-haut Gaussien (FC=0,0625)
")
68
Transformée de Walsh (ondes carrées +1/-1)
")
69
Walsh passe-bas gaussien

70
Transformée inverse Fourier Walsh

81
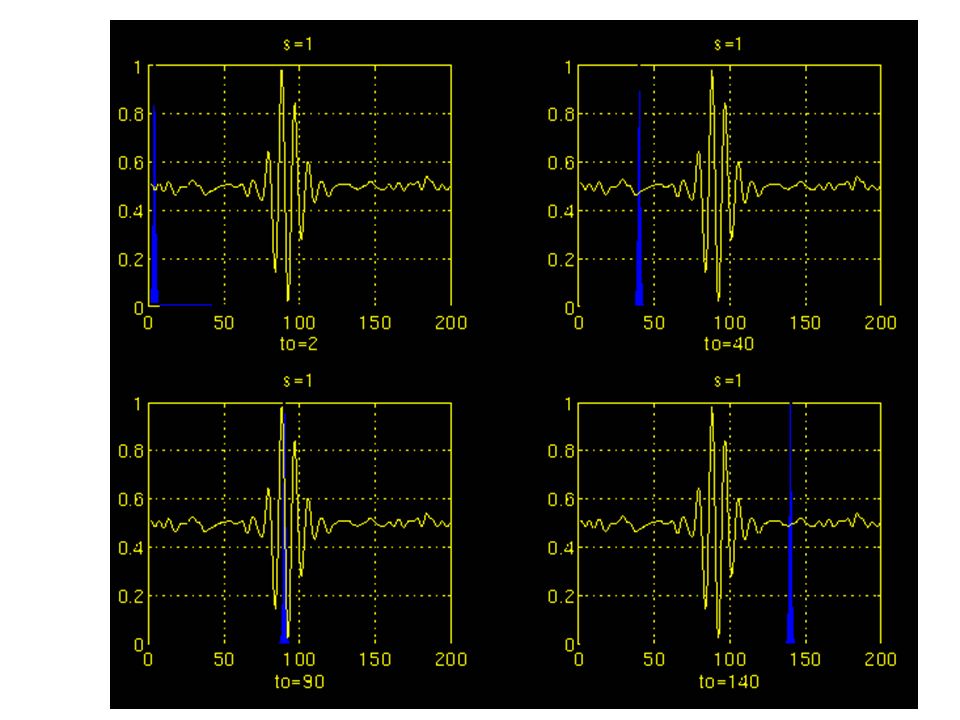
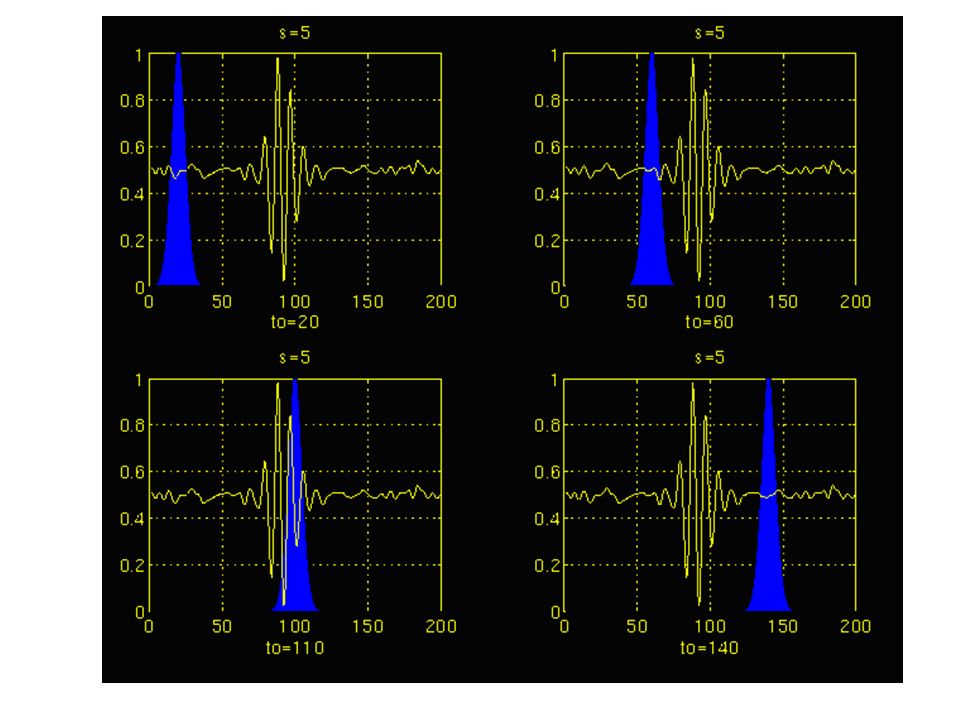
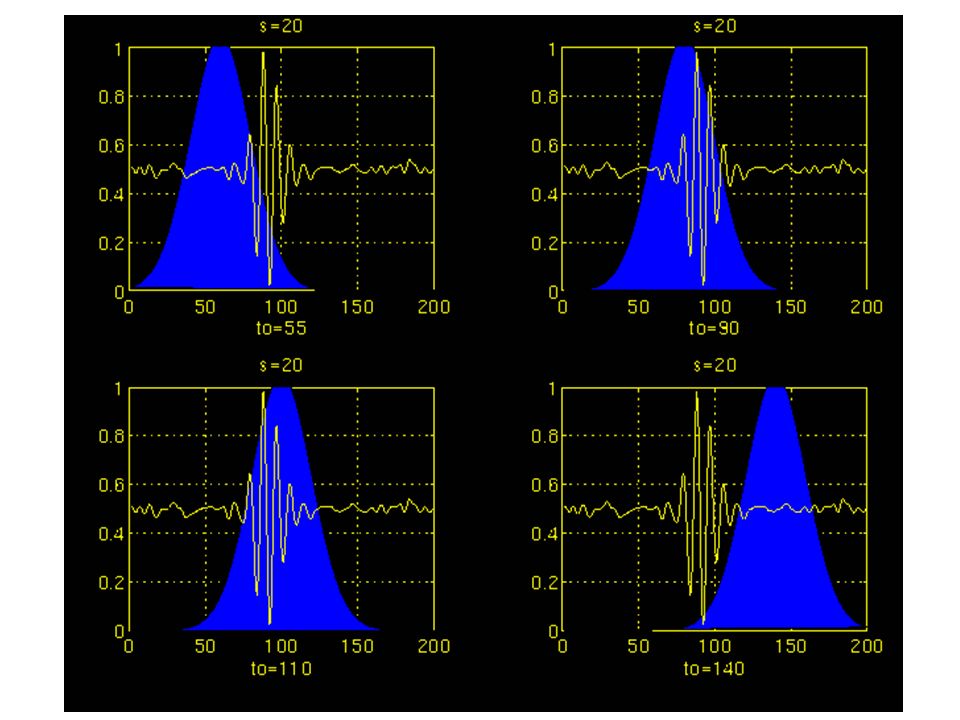
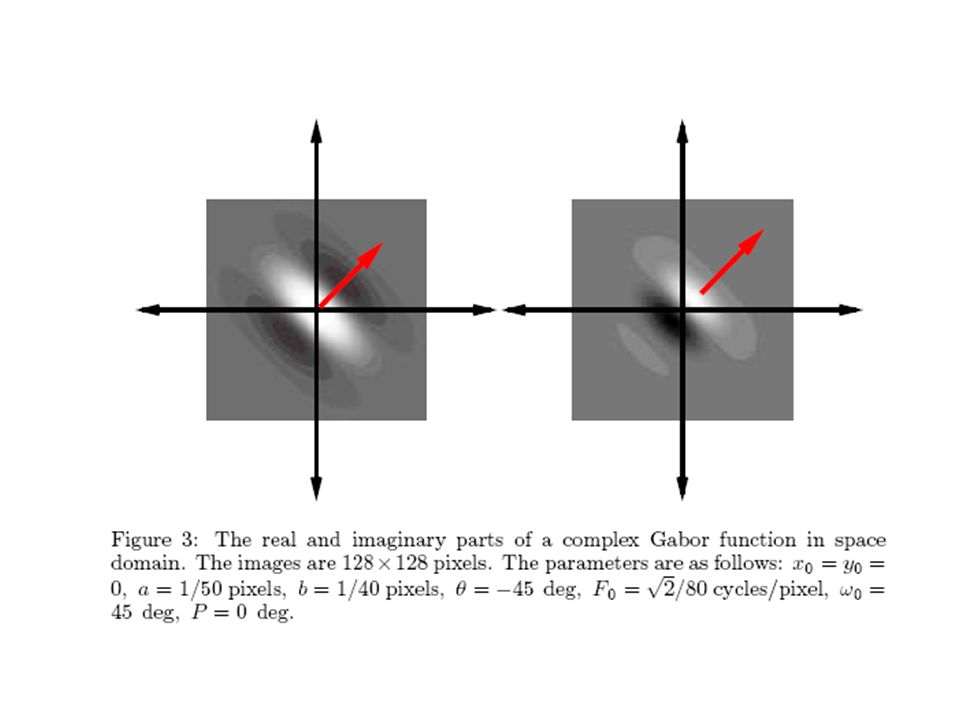
Domaine spatial L’enveloppe: La porteuse: une fonction gaussienne
Une Sinusoïde complexe

82
La porteuse Fréquences spatiales Déphasage

84
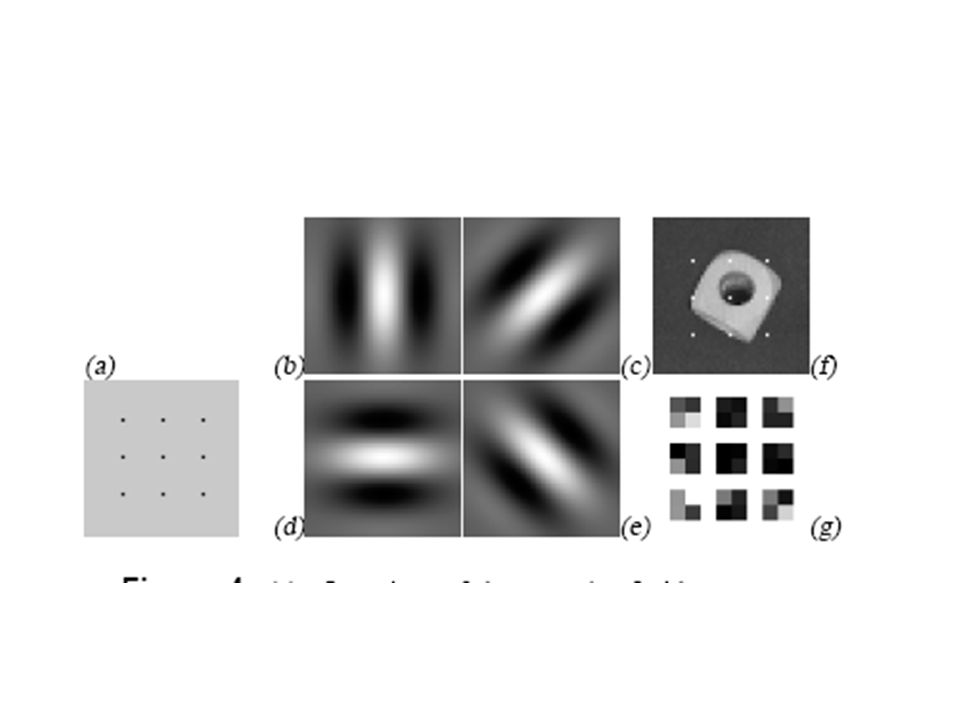
La gaussienne

87
Catégories Filtres dans le domaine spatial
Filtres dans un autre domaine que le spatial (ex. domaine des fréquences) Filtres morphologiques
 Filtres morphologiques.")
88
Morphologie mathématique
Application à des images binaires Application à des images N&B

89
Images binaires: Modus operandi

90
Les éléments structurants
Exemple 3x3 X = sans effet

91
Opérations: Érosion = 1 miss Élément structurant = 2 miss hit
Si « hit » output = 1 Si « miss »---output = 0

92
Opérations: Dilatation
= 1 hit Élément structurant = 2 miss Si « hit » output = 0 Si « miss »---output = 1

93
Opérations: Ouverture
= 1 Érosion = 2 Dilatation N x Érosion N x Dilatation

94
Opérations: Fermeture
= 1 Dilatation = 2 Érosion N x Dilatation N x Érosion

95
Opérations: Délimitation
= 1 Érosion = 2 - =

96
Opérations: Squelettisation
Processus itératif avec érosion selon des éléments structurants directionnels (voir Parker 1997)
")
97
Images N&B Érosion, x (0, -255) Dilatation, x (0, +255)
Ouverture + Fermeture– même principe que dans le cas binaire

98
Opérations Érosion et Dilatation Ouverture et Fermeture
Transformations « Chapeau haut de forme » et « puit » Gradient morphologique Détection d’arêtes « bassin versant »

99
Top-hat

100
Image originale Image dilatée Image érodée Gradient morphologique: Dilatée - érodée Image lissée par filtre gaussien Originale - lissée

101
Bassin versant

Présentations similaires












>")


>")




