Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
3. La tenue d’altitude But
Conserver l’altitude de l’avion affichée par le pilote. Il s’agit d’une régulation. Pourquoi ? L’altitude est un paramètre de navigation important.

2
ordre « à monter » donc qc > 0 dmc < 0
Loi de pilotage ATTENTION : il s’agit de variations autour d’un point d’équilibre Zm > Zc= 0 ordre « à descendre » qc < 0 dmc > 0 Indice c = consigne Indice m = mesuré Zm < 0 ordre « à monter » donc qc > 0 dmc < 0 Zm = ordre nul qc = 0 dmc = 0

3
Méthode d’étude A des fins de simplification, les calculs préliminaires seront exécutés sur le modèle avion avec les modes « OI » et « Ph » découplés. Dans l’étude générale réalisée sous MATLAB on négligera l’amortisseur de tangage. Les simulations seront réalisées sur le modèle complet décrit sans découplage des modes à partir d’une représentation d’état adaptée.

4
Amortisseur de tangage
Schéma fonctionnel ATTENTION aux signes Amortisseur de tangage Loi z Loi q BdG 1 - + + + - + Gyromètre Mesure de q 1 1 Loi q Mesure de z 1 + -

5
Fonction de transfert z/q
Pour la tenue d’altitude on considère que seule la phugoïde (mode lent) intervient. On admet que la vitesse est constante (sinon on à recours à une automanette) et que q # 0. La tenue d’assiette jouant son rôle c et dans ce cas q = 0. Par ailleurs les hypothèses permettent d’écrire :
 intervient. On admet que la vitesse est constante (sinon on à recours à une automanette) et que q # 0. La tenue d’assiette jouant son rôle c et dans ce cas q = 0. Par ailleurs les hypothèses permettent d’écrire :")
6
Fonction de transfert ATTENTION aux signes

7
Étude par le lieu de Evans : normalisation de la FTBO

8
Étude par le lieu de Evans : tracé du lieu
1 point d’arrivée 5 points de départ 3 pôles de l’amortisseur de la tenue d’assiette Tracer l’allure du lieu d’Evans à la main

9
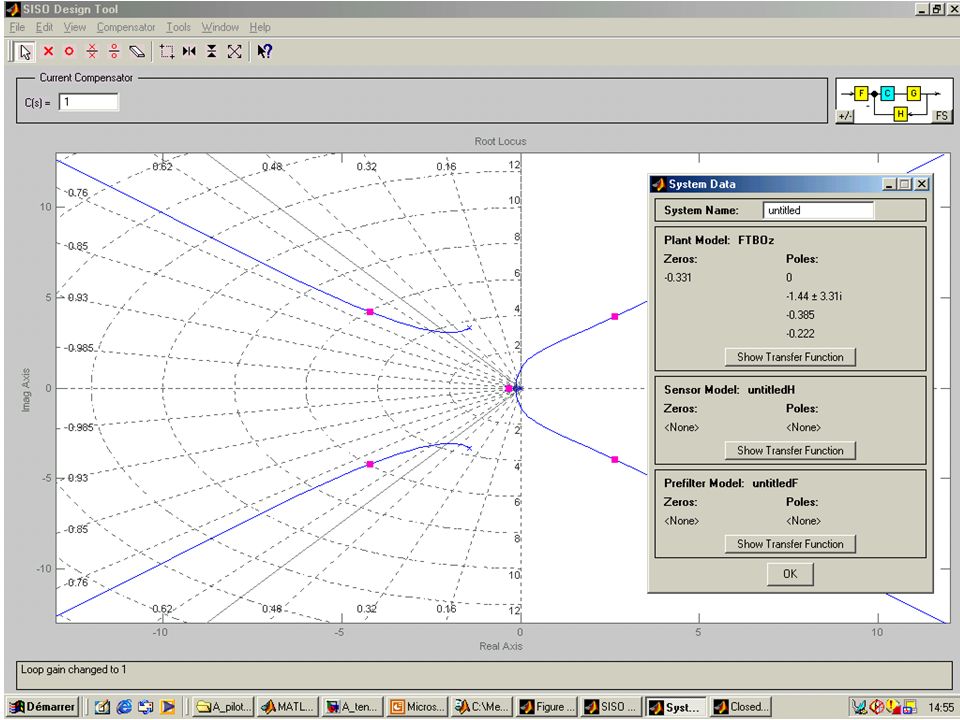
Utilisation de SISO design tool
>> FTBOz=Tteta_bf1*tf([V*Zal],[1 Zal 0]) Transfer function: 799 s s^ s^ s^ s^ s
 Transfer function: 799 s s^ s^ s^ s^ s.")
11
12% de dépassement

12
f

13
Réponse indicielle >>FTBFz=feedback(0.000816*FTBOz,1);
>>step(FTBFz); D1 = 13% tr5% = 24,6 s
; D1 = 13% tr5% = 24,6 s.")
14
Performance de la tenue d’altitude

15
Simulation de la tenue d’altitude du modèle complet

16
Réponse indicielle de la boucle de tenue d’altitude

17
Etudier pour le point de vol n°2 :
TRAVAIL DEMANDE Etudier pour le point de vol n°2 : La tenue de pente La tenue d’altitude Conduire les études selon la démarche suivi dans le cours en supposant que les modes peuvent être découplés (pas de termes de couplage = modèle simplifié) Utiliser les fonctions de transfert dans un premier temps pour les études et la simulation Utiliser la représentation d’état en simulation pour un approfondissement si le temps le permet.
 Utiliser les fonctions de transfert dans un premier temps pour les études et la simulation. Utiliser la représentation d’état en simulation pour un approfondissement si le temps le permet.")
Présentations similaires





 Pilotage automatique des aéronefs – Cours de M. Cougnon 3. Le pilote automatique 1. Méthode détude dun PA.>")










>")


