Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
PROGRAMMATION DYNAMIQUE (Exemples d’application)
UNIVERSITE ABDELMALAK ESSAADI Faculté Polydisciplinaire de Tétouan MASTER SPECIALISE : GESTION INFORMATIQUE DE L’ENTREPRISE PROGRAMMATION DYNAMIQUE (Exemples d’application) réalisé par : BEN ALILOU soumaya BOUDINE Ahlam TERROUFI Zineb Enacdré par: Pr. Mohamed El Merouani Promotion : 2014 / 2016
 réalisé par : BEN ALILOU soumaya. BOUDINE Ahlam. TERROUFI Zineb. Enacdré par: Pr. Mohamed El Merouani. Promotion : 2014 /")
2
Plan Introduction Programmation dynamique déterministe
Programmation dynamique Probabiliste Programmation linéaire Conclusion Chapitre 2 : Etude phytochimique Chapitre 3 : Etude biologique Chapitre 4 : Haloxylon scoparium

3
Introduction

4
Programmation dynamique déterministe

5
Introduction Dans cette section on s’intéresse au problème dit déterministe, où la connaissance de l’état et de la décision à prendre suffit pour savoir l’état à l’étape suivante. Un problème dynamique déterministe est caractérisé par la détermination de la fonction objective. Cette fonction peut être le minimum de la somme de la contribution induite par le passage d’un état à un autre, ou le maximum d’une telle somme, ou le minimum du produit de ces termes… etc. Il faut aussi déterminer la nature de l’ensemble des états dans chacune des étapes. Ces états Sn peuvent être représentés par des variables discrètes ou par des variables continues ou dans certains cas par un vecteur.

6
La structure de base d’un problème dynamique déterministe

7
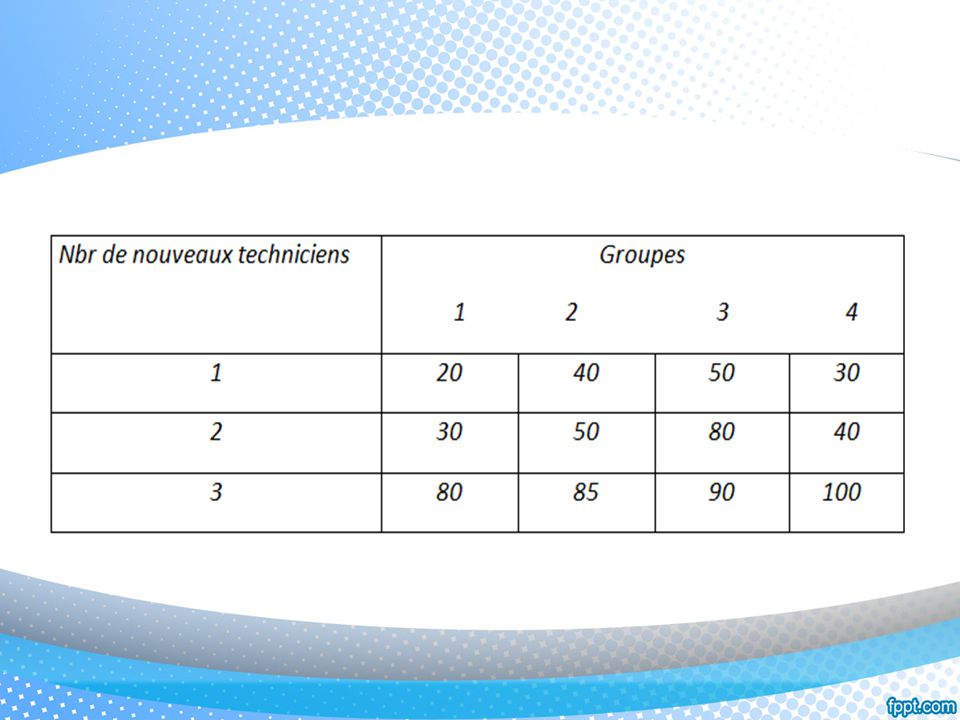
Exemple Une société industrielle recrute trois techniciens à fin de renforcer certain de ses quatre groupes de travail dont le but de maximiser le nombre totale de pièces fabriqués par l’ensemble de ses employer. La rentabilité de ces techniciens se mesure par le nombre de pièces additionnelle que va produire chaque group. Le tableau suivant nous donne le nombre de pièces additionnelles construites par chaque groupe pour chacune des affectations possibles des nouveaux techniciens

9
Résolution : Etape : groupes xn : nombre technicien à affecter à l’étape n Etat : nombre de technicien non encor affectés Pi(xi) :nombre de pièces additionnelles lorsqu’on affecte xi technicien au groupe i Problème : trouver x1*, x2*, x3*et x4* solution optimal Fn (S) c’est le nombre total de pièces a fabriquer par l’ensemble des groupes n=1,2, 3et4: fn(S) = max fn(S, xn) n=1,2,3,4 avec fn(S, xn) = pn(xn) + fn+1(S, xn),
 :nombre de pièces additionnelles lorsqu’on affecte xi technicien au groupe i. Problème : trouver x1*, x2*, x3*et x4* solution optimal. Fn (S) c’est le nombre total de pièces a fabriquer par l’ensemble des groupes n=1,2, 3et4: fn(S) = max fn(S, xn) n=1,2,3,4. avec fn(S, xn) = pn(xn) + fn+1(S, xn),")
10
Etape 4 :

11
Etape 3 :

12
Etape 2 :

13
Etape 1 : le rendement optimale est 120 (=f1*(3)) pièces
) pièces")
14
La programmation dynamique probabiliste

15
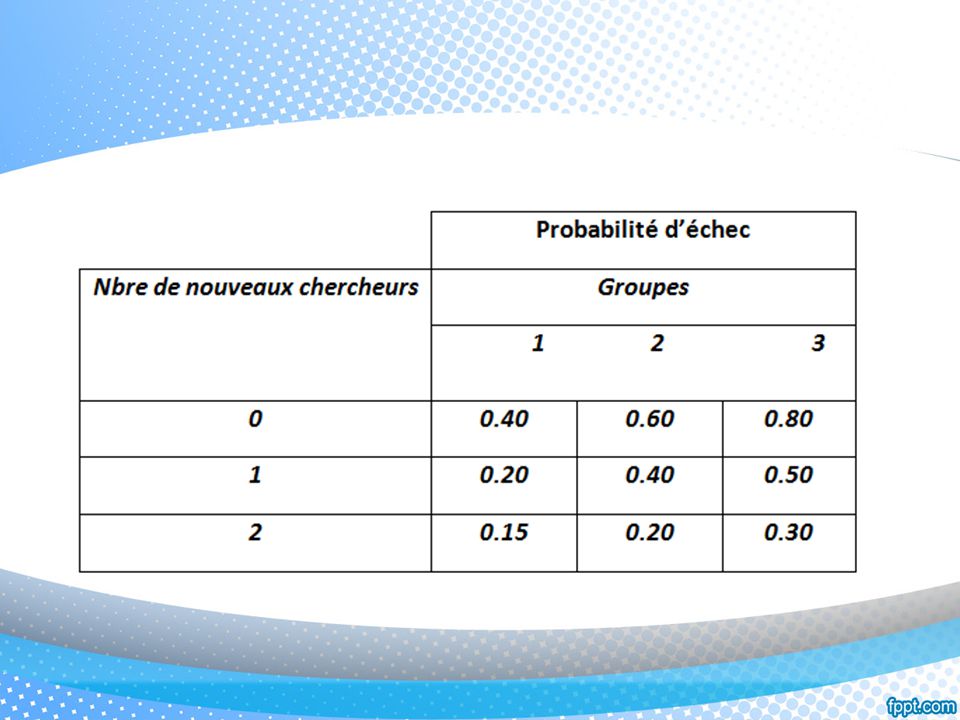
Exemple Un projet du gouvernement est étudié par 3 groupes de chercheurs. La probabilité que chacun de ces groupes 1, 2 et 3, n’arrive pas à terminer le projet est respectivement: 0,4; 0,6 et 0,8. Si on ajoute à ces groupes deux nouveaux chercheurs, les probabilités d’échec sont données par ce tableau

17
Résolution : Etapes : groupes xn : représente le nombre de chercheurs affectés à l’étape n, n = 1, 2, 3. Etat : le nombre de chercheurs qui peuvent être affectés à l’étape (ou groupe) n. Pi(xi) : la probabilité d’échec du groupe i si on lui ajoute xi chercheurs additionnels. Problème : trouver x1*, x2* et x3* solution optimal
 n. Pi(xi) : la probabilité d’échec du groupe i si on lui ajoute xi chercheurs additionnels. Problème : trouver x1*, x2* et x3* solution optimal.")
18
Fn(S) c’est la probabilité minimale que les groupes n=1,2
Fn(S) c’est la probabilité minimale que les groupes n=1,2., 3 échouent dans leurs recherches : fn (S) = min fn (S, xn) n=1,2,3 avec fn(S, xn) = pn(xn) × fn+1(S, xn), Le problème est de déterminer l’allocation optimale de ces deux chercheurs afin de minimiser la probabilité que les groupes de recherche échouent dans leur travail
 c’est la probabilité minimale que les groupes n=1,2., 3 échouent dans leurs recherches : fn (S) = min fn (S, xn) n=1,2,3 avec fn(S, xn) = pn(xn) × fn+1(S, xn), Le problème est de déterminer l’allocation optimale de ces deux chercheurs afin de minimiser la probabilité que les groupes de recherche échouent dans leur travail.")
19
Etape n=3 :

20
Etape n=2 :

21
Etape n=1:

22
Etape n=1: La Solution optimale : x1* = 1 x2* = 0 x3* = 1 La probabilité d’échec des trois groupes de recherche est de 0,06.

23
Résolution d'un programme linéaire
Considérons le programme linéaire suivant La structure de base du problème est

24
Résolution d'un programme linéaire
On considère toutes les valeurs possibles de X1(0,1,2) ; et on obtient par conséquence les états suivants : S (9,11), S (6,7) S (3,3). Etape 2
 ; et on obtient par conséquence les états suivants : S (9,11), S (6,7) S (3,3). Etape 2")
25
Résolution d'un programme linéaire
Etape 1 On a : f1((R1,R2), x1) == 3 x1 + f * ((R1- 3 x1 , R2- 4 x1 ))). La solution optimale est (x1,x2)=(0,2) et la valeur de la fonction objectif est égale à 10.
, x1) == 3 x1 + f * ((R1- 3 x1 , R2- 4 x1 ))). La solution optimale est (x1,x2)=(0,2) et la valeur de la fonction objectif est égale à 10.")
26
Conclusion

27
Merci pour votre attention !

Présentations similaires