Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Elec 2311 Physique interne des convertisseurs électromécaniques
E. Matagne (cotitulaire, coordonnateur) B. Dehez (cotitulaire) V. Kluyskens et J. Devries (assistants) Les documents relatifs au projet et les renseignements « administratifs » seront communiqués via iCampus. Merci de vous inscrire au plus tôt sur le site i-campus du cours. Les documents relatifs au cours magistral seront distribués via le site Information scientifique et technique plus vaste que ce qui est exigé. Vous devez considérer au moins les informations relatives au projet et les documents accessibles via les liens figurant dans la colonne relative à la « matière ». Attention ! Mise à jour terminée seulement au premier jour de la semaine.
 B. Dehez (cotitulaire) V. Kluyskens et J. Devries (assistants) Les documents relatifs au projet et les renseignements « administratifs » seront communiqués via iCampus. Merci de vous inscrire au plus tôt sur le site i-campus du cours. Les documents relatifs au cours magistral seront distribués via le site. Information scientifique et technique plus vaste que ce qui est exigé. Vous devez considérer au moins les informations relatives au projet et les documents accessibles via les liens figurant dans la colonne relative à la « matière ». Attention ! Mise à jour terminée seulement au premier jour de la semaine.")
2
Attention au changement de calendrier !
Permutation des TP avec ceux du cours LELEC2660 Les TP se donneront le vendredi à 8h30 au local BA01 (au lieu du jeudi à 14h00 au local Pcur 04)
")
3
Projet propre au cours : débutera le vendredi 7 octobre
Le cours magistral occupera aussi le module TP pendant les premières semaines : le projet sera ainsi abordé avec suffisamment de connaissances préalables. Le site Internet reste organisé comme s’il n’y avait qu’un cours magistral par semaine ! La matière prévue pour ce vendredi est donc dans un répertoire correspondant à la semaine 2 !

4
Remarque importante Vous devrez acquérir pendant ce cours de nouvelles notions : cela n’est possible que par un contact régulier avec ces notions ! Petit calcul : 4 ECTS 4/30 = 13.3% du temps Mettre le paquet en début de quadrimestre car la fin du quadrimestre est plus chargée (projet mécatronique …..)
")
5
Introduction à la conception
Semaine 1 Introduction à la conception Une suite d ’étapes….souvent bouleversée Définition du besoin et sa mathématisation Identification des degrés de liberté Choix du modèle et de la méthode d ’analyse Validation Optimisation Vérification finale

6
1. Définition du besoin L ’étape la plus importante et la plus difficile ! Le « client » a rarement une idée précise de son besoin (demandes contradictoires…) prise de conscience utilité d ’une préétude Importance du « cahier des charges » Contraintes supplémentaires d ’origines diverses moins bon résultat. volonté de rendre le texte plus clair (l’aspect « juridique » est nécessaire entre collaborateurs ayant des intérêts différents) respect d ’une normalisation (parfois conditions d’essai irréalistes) utilisation de notions propres à une technique ou une situation particulière (vérins hydrauliques vérins électriques) référence à un modèle non valide (valeurs d ’inductance ou réponse en fréquence spécifiées pour un dispositif non linéaire.. ) demander comment les tests seront faits ! choix initiaux arbitraires (client ou autres équipes trop pressés) échange entre les équipes de logiciels et non de valeurs + prévoir synthèse Situation inconfortable si le respect du cahier des charges est impossible (par ex. dynamique contre filtrage du bruit du signal de commande) et qu’il n’est pas négociable !
 prise de conscience. utilité d ’une préétude. Importance du « cahier des charges » Contraintes supplémentaires d ’origines diverses moins bon résultat. volonté de rendre le texte plus clair (l’aspect « juridique » est nécessaire entre collaborateurs ayant des intérêts différents) respect d ’une normalisation (parfois conditions d’essai irréalistes) utilisation de notions propres à une technique ou une situation particulière (vérins hydrauliques vérins électriques) référence à un modèle non valide (valeurs d ’inductance ou réponse en fréquence spécifiées pour un dispositif non linéaire.. ) demander comment les tests seront faits ! choix initiaux arbitraires (client ou autres équipes trop pressés) échange entre les équipes de logiciels et non de valeurs + prévoir synthèse. Situation inconfortable si le respect du cahier des charges est impossible (par ex. dynamique contre filtrage du bruit du signal de commande) et qu’il n’est pas négociable !")
7
L’activité principale du concepteur n’est pas
Prendre connaissance du problème Le résoudre Mais Poser correctement un problème mal posé

8
Mathématisation du besoin
Ce qui se conçoit bien … Une ou des fonctions objectifs (de préférence une seule) Elle prend valeur dans un ensemble ordonné (souvent |R ) Si possible, raisonner en terme de profit ( en € ) Tenir compte de la durée de vie du dispositif ? Tenir compte de tous les frais (batteries, énergie, manques à gagner causés par le dispositif, coût écologique…?) Actualiser (intérêts et inflation). Souvent, optimisation (partielle) sur un autre critère (puissance, masse…). Des contraintes externes dimensions extérieures, puissance de crête, température de la surface, niveau d ’isolation… Note : on peut parfois combiner les contraintes et la fonction objectif, par exemple en considérant qu’une solution qui ne vérifie pas une contrainte est moins bonne que n’importe quelle autre qui les vérifie.
 Elle prend valeur dans un ensemble ordonné (souvent |R ) Si possible, raisonner en terme de profit ( en € ) Tenir compte de la durée de vie du dispositif Tenir compte de tous les frais (batteries, énergie, manques à gagner causés par le dispositif, coût écologique… ) Actualiser (intérêts et inflation). Souvent, optimisation (partielle) sur un autre critère (puissance, masse…). Des contraintes externes. dimensions extérieures, puissance de crête, température de la surface, niveau d ’isolation… Note : on peut parfois combiner les contraintes et la fonction objectif, par exemple en considérant qu’une solution qui ne vérifie pas une contrainte est moins bonne que n’importe quelle autre qui les vérifie.")
9
Actuellement, on optimise souvent en fonction de l’utilisation
Actuellement, on optimise souvent en fonction de l’utilisation. Cela conduit à des fonctions objectif ou à des contraintes complexes. Souvent, l’évaluation de ces fonctions nécessite une simulation temporelle (donc de nombreuses analyses du dispositif).
.")
10
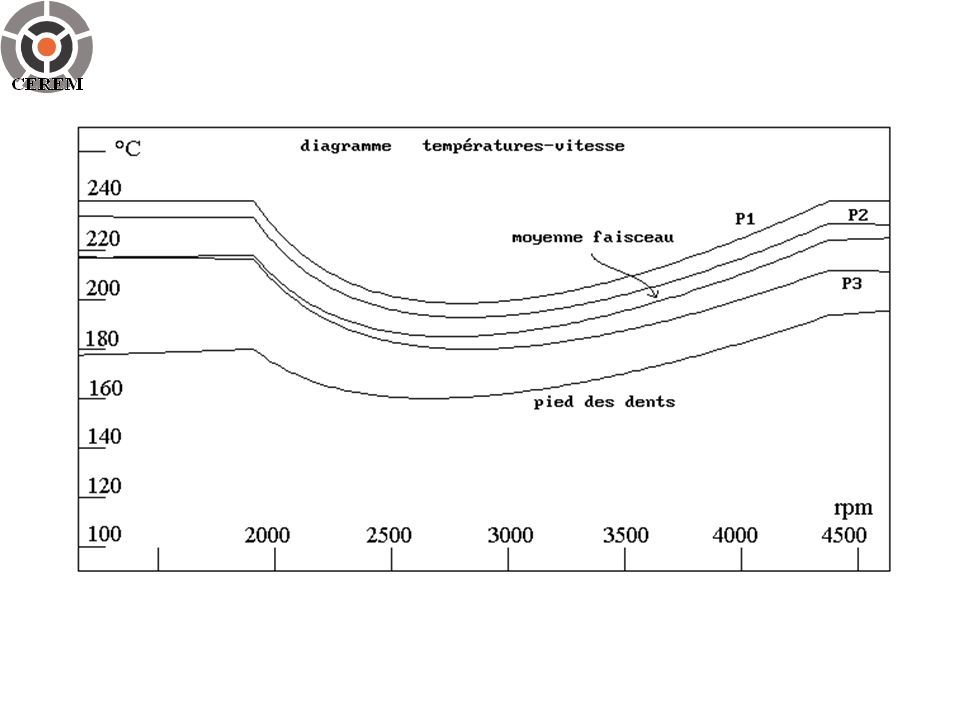
Exemple : dimensionner une génératrice pouvant fonctionner dans une large gamme de vitesse
Une étude du fonctionnement en régime suffit, mais pour un grand nombre de vitesses !

12
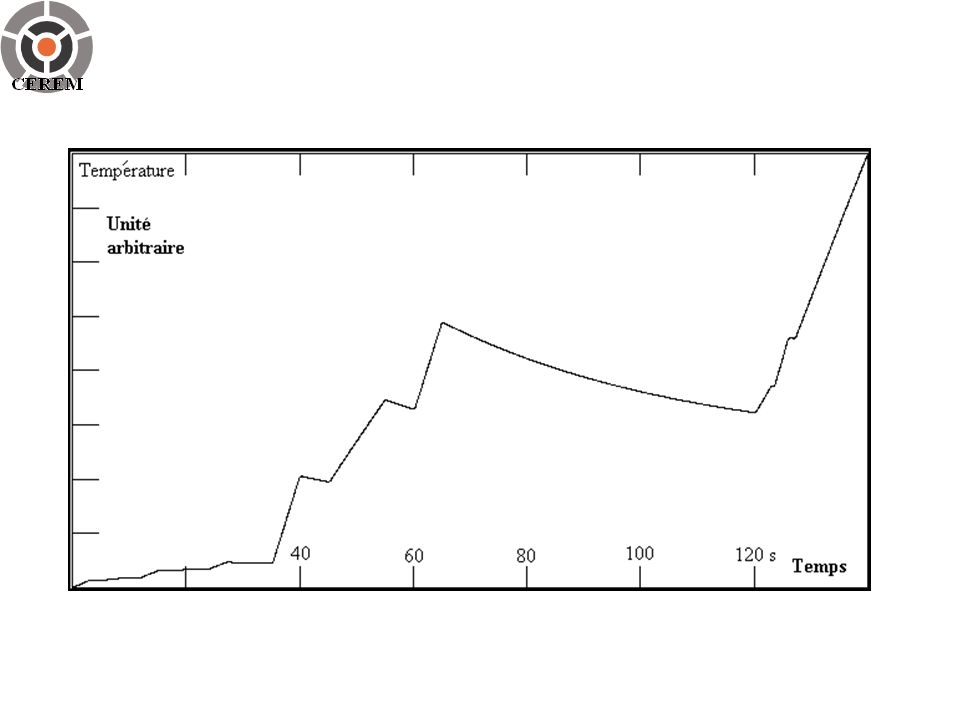
Autre exemple : actionneur pour vérin de fusée
Durée de vie de quelques minutes : on doit considérer le transitoire mécanique (une partie importante du couple sert à vaincre l’inertie), mais pas forcément le transitoire électrique
, mais pas forcément le transitoire électrique.")
14
Schéma de calcul de la fonction objectif dans le cas où une simulation temporelle est nécessaire

15
Deux objectifs : solution = courbe de Pareto
Il est important de limiter le nombre de fonctions objectifs Un objectif Deux objectifs : solution = courbe de Pareto Définie par m points, donc nombre de calculs croissant Le nombre d’évaluations des fonctions objectifs à effectuer croît exponentiellement avec le nombre de fonctions objectifs. Le résultat est aussi plus difficile à utiliser en pratique.

16
Parfois, il n’est pas possible de faire l’étude avec une seule fonction objectif
désir de garder une palette de choix afin de pouvoir prendre une décision rapide par la suite (en cours de négociation ou pour pouvoir réagir à l’évolution des circonstances) désir de garder secrètes certaines motivations ou informations L’optimisation multiobjectif est beaucoup plus difficile et coûteuse en moyens informatiques que l’optimisation simple objectif. Il est donc particulièrement important dans ce cas de disposer d’un modèle simplifié du dispositif. Il peut arriver qu’une partie des solutions soient obtenues avec une structure et une autre partie avec une structure différente ! Méthodes : faire un grand nombre d’optimisations monoobjectif en transformant les fonctions objectif non utilisées en contraintes ou en combinant les objectifs avec des poids variables. méthodes spécifiques (voir dernier cours)
 désir de garder secrètes certaines motivations ou informations. L’optimisation multiobjectif est beaucoup plus difficile et coûteuse en moyens informatiques que l’optimisation simple objectif. Il est donc particulièrement important dans ce cas de disposer d’un modèle simplifié du dispositif. Il peut arriver qu’une partie des solutions soient obtenues avec une structure et une autre partie avec une structure différente ! Méthodes : faire un grand nombre d’optimisations monoobjectif en transformant les fonctions objectif non utilisées en contraintes ou en combinant les objectifs avec des poids variables. méthodes spécifiques (voir dernier cours)")
17
2. Identification des degrés de liberté
On assiste à l’émergence de deux philosophies Optimisation topologique : on laisse à l’ordinateur beaucoup de liberté dans la recherche de l’optimum, par exemple en imposant seulement qu’un convertisseur électromécanique comporte une partie mobile en rotation par rapport à une partie fixe. Optimisation en fonction de paramètres constructifs : on impose le respect d’une structure générale, par exemple celle d’une machine cylindrique à stator triphasé classique et aimants montés en surface.

18
Optimisation topologique
Avantages réel : on peut obtenir des solutions nouvelles qu’une personne ayant une culture électrotechnique n’aurait pas imaginées illusoire : pas besoin d’avoir une formation dans le domaine ! Inconvénients nombre d’analyses du dispositif extrêmement grand actuellement, impossible de faire par ce moyen une optimisation selon un objectif complexe la solution obtenue n’est pas nécessairement réalisable techniquement

19
Optimisation topologique
Exemple : remplissage de matière Le résultat (a) semble aberrant. Une personne ayant une culture électrotechnique y reconnaît une structure stratifiée destinée à orienter verticalement le flux. Il est alors possible de terminer l’optimisation de façon plus classique.
 semble aberrant. Une personne ayant une culture électrotechnique y reconnaît une structure stratifiée destinée à orienter verticalement le flux. Il est alors possible de terminer l’optimisation de façon plus classique.")
20
Optimisation selon des paramètres constructifs
(optimisation paramétrique) Avantages : optimisation plus rapide (moins de degrés de liberté) donc possibilité d’utiliser des fonctions objectifs plus sophistiquées le résultat est réalisable si les contraintes ont été bien posées Inconvénients le résultat dépend du choix de la structure, donc de l’expertise du concepteur certaines solutions innovantes risquent de ne pas être envisagées
 Avantages : optimisation plus rapide (moins de degrés de liberté) donc possibilité d’utiliser des fonctions objectifs plus sophistiquées. le résultat est réalisable si les contraintes ont été bien posées. Inconvénients. le résultat dépend du choix de la structure, donc de l’expertise du concepteur. certaines solutions innovantes risquent de ne pas être envisagées.")
21
Optimisation selon des paramètres constructifs
Une étude préliminaire permet souvent d ’éliminer certaines structures (recours aux expressions fondamentales, des densités de force par exemple) Les structures retenues doivent être optimisées séparément (la valeur de B optimum pour l ’une n ’est pas forcément l ’optimum de l ’autre...) avec le même soin La comparaison est facile à biaiser : rester méfiant.
 Les structures retenues doivent être optimisées. séparément. (la valeur de B optimum pour l ’une n ’est pas forcément l ’optimum de l ’autre...) avec le même soin. La comparaison est facile à biaiser : rester méfiant.")
22
Dans le choix de la structure, ne pas se limiter aux solutions classiques.
Exemple : les machines à phases séparées (a) ont été utilisées dans les nouveaux domaines (machines à déplacement linéaire et machines discoïdes) avant que l’on pense à les utiliser aussi pour les machines rotatives, traditionnellement à champ tournant (b).
 ont été utilisées dans les nouveaux domaines (machines à déplacement linéaire et machines discoïdes) avant que l’on pense à les utiliser aussi pour les machines rotatives, traditionnellement à champ tournant (b).")
23
Réduire le nombre de degrés de liberté en éliminant des contraintes
Un choix judicieux des paramètres permet de simplifier le calcul de la fonction objectif et des contraintes, ainsi que l’optimisation. Réduire le nombre de degrés de liberté en éliminant des contraintes en effectuant des optimisations partielles (exemple du partage d ’une fenêtre magnétique entre deux enroulements…) en remettant à plus tard la détermination des paramètres non dimensionnants (nombre de spires ?) Rendre les contraintes faciles à vérifier dès le début de l’analyse Si possible, par le choix des paramètres, faire apparaître les contraintes sous la forme d’un intervalle de variation des paramètres. Hiérarchiser les contraintes vérifiées en cours de calcul (en abrégeant l’analyse quand une contrainte vitale n’est pas respectée) vérifiées seulement sur le résultat final (les remplacer par une pénalité, surtout si on n’a pas de point de départ qui les vérifie toutes)
 en remettant à plus tard la détermination des paramètres non dimensionnants (nombre de spires ) Rendre les contraintes faciles à vérifier dès le début de l’analyse. Si possible, par le choix des paramètres, faire apparaître les contraintes sous la forme d’un intervalle de variation des paramètres. Hiérarchiser les contraintes. vérifiées en cours de calcul (en abrégeant l’analyse quand une contrainte vitale n’est pas respectée) vérifiées seulement sur le résultat final (les remplacer par une pénalité, surtout si on n’a pas de point de départ qui les vérifie toutes)")
24
3. Choix d ’un modèle Échelles considérées
Nombre de dimensions géométriques considérées (4 si temps et espace pleinement considérés) Réduire ce nombre si possible (symétries, passage à un modèle 2 D ou de type circuit, recours aux phaseurs...) Échelles considérées temps : commutations des semi-conducteurs (ns, ms), période électrique (ms, ms) (...50 Hz, 1 MHz), évolution «mécanique » (s), vieillissement (années) espace : atomes, molécules, monocristaux… denture, pas polaire.…univers. Autres caractéristiques importantes degré de généralité, possibilité d ’extension et d ’adaptation précision (quelle est la quantité d ’information significative ? )
 Réduire ce nombre si possible. (symétries, passage à un modèle 2 D ou de type circuit, recours aux phaseurs...) Échelles considérées. temps : commutations des semi-conducteurs (ns, ms), période électrique (ms, ms) (...50 Hz, 1 MHz), évolution «mécanique » (s), vieillissement (années) espace : atomes, molécules, monocristaux… denture, pas polaire.…univers. Autres caractéristiques importantes. degré de généralité, possibilité d ’extension et d ’adaptation. précision (quelle est la quantité d ’information significative )")
25
Rappel important sur les modèles
Les systèmes de traitement de l’information (dont notre cerveau) n’ont pas d’accès direct à la réalité. Nous utilisons toujours un modèle, à savoir une création de l ’esprit qui correspond à notre perception de la réalité et sur laquelle nous pouvons raisonner On peut rêver d ’un modèle idéal rendant compte parfaitement de la réalité… c’est utopique et de toute façon un tel modèle serait inutilisable.
 n’ont pas d’accès direct à la réalité. Nous utilisons toujours un modèle, à savoir une création de l ’esprit qui correspond à notre perception de la réalité et sur laquelle nous pouvons raisonner. On peut rêver d ’un modèle idéal rendant compte parfaitement de la réalité… c’est utopique et de toute façon un tel modèle serait inutilisable.")
26
3’. Choix d ’une méthode d ’analyse
Le choix est lié à celui du modèle ! Les méthodes analytiques nécessitent une modélisation plus simple. Autres caractéristiques importantes prix (achat de logiciels, ressources informatiques, main d ’œuvre...) possibilité d ’extension et d ’adaptation durée de mise au point et programmation durée par cas traité (temps calcul, temps interactif…) fiabilité (programmes certifiés… et l ’utilisateur ? ) absence d ’erreurs aléatoires (gênantes pour les comparaisons ) possibilité de calculer toutes les grandeurs souhaitées (forces…) facilités graphiques (entrée données, interprétation des résultats illustration « publicitaire » des rapports parfois à éviter)
 possibilité d ’extension et d ’adaptation. durée de mise au point et programmation. durée par cas traité (temps calcul, temps interactif…) fiabilité (programmes certifiés… et l ’utilisateur ) absence d ’erreurs aléatoires (gênantes pour les comparaisons ) possibilité de calculer toutes les grandeurs souhaitées (forces…) facilités graphiques (entrée données, interprétation des résultats... illustration « publicitaire » des rapports parfois à éviter)")
27
4. Validation On teste la méthode d ’analyse, pas le résultat final !
Approximations du modèle Risque d ’erreur (programmation…) comparaison avec une autre méthode (moins efficace mais suffisamment sûre) comparaison avec l ’expérience (maquettes ≠ prototypes…) On teste la méthode d ’analyse, pas le résultat final ! Une maquette peut être assez éloignée du résultat final. Elle doit être disponible suffisamment tôt. On peut valider la méthode sans attendre la fin de l’étude. Elle permet de fixer la valeur de certains paramètres (comme ceux qui servent à calculer les dimensions des têtes de bobines par exemple)
 comparaison avec une autre méthode. (moins efficace mais suffisamment sûre) comparaison avec l ’expérience (maquettes ≠ prototypes…) On teste la méthode d ’analyse, pas le résultat final ! Une maquette peut être assez éloignée du résultat final. Elle doit être disponible suffisamment tôt. On peut valider la méthode sans attendre la fin de l’étude. Elle permet de fixer la valeur de certains paramètres (comme ceux qui servent à calculer les dimensions des têtes de bobines par exemple)")
28
5. Optimisation Le choix de la méthode d’optimisation doit tenir compte des caractéristiques des problèmes d’électrotechnique fonction objectif souvent implicite (pas de forme analytique) pas de calcul de ses dérivées autre que numérique calcul compliqué bruit numérique non linéarités peaux de bananes fréquentes contraintes compliquées (difficulté de trouver un point de départ acceptable si on ne remplace pas certaines par une pénalité) Il faut utiliser des méthodes robustes (l ’invariance est de bon augure) On y reviendra lors d’une prochaine séance.
 pas de calcul de ses dérivées autre que numérique. calcul compliqué bruit numérique. non linéarités. peaux de bananes fréquentes. contraintes compliquées. (difficulté de trouver un point de départ acceptable. si on ne remplace pas certaines par une pénalité) Il faut utiliser des méthodes robustes (l ’invariance est de bon augure) On y reviendra lors d’une prochaine séance.")
29
6. Vérification finale Semblable à la validation, mais effectuée sur le dispositif tel que finalement retenu (prototypes…) La possibilité de vérification est limitée dans le cas d’une optimisation multi-objectifs car l’ensemble des solutions retenues est alors infini. Rappel : Changement d’horaire pour les TP Les séances de TP des premières semaines seront remplacées par le cours magistral.

Présentations similaires











>")







