Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Bastien Benoît Corentin Hugo Paul-Antoine Pierre Samir
Bonjour La bête Bastien Benoît Corentin Hugo Paul-Antoine Pierre Samir

2
But du projet Réaliser en deuxième année, avec des équipes allant de 4 à 6 étudiant, un Robot Marcheur. Par Robot Marcheur, on désigne un système motorisé par une perceuse, entièrement mécanique. Le projet s’étale sur toute l’année, avec un concours à la fin mars Lors de ce concours, plusieurs équipes, venues de toutes la France seront présentent pour une compétition inter- IUT_GMP

3
Revue de conception Schéma cinématique papier Schéma cinématique en CAO animée Calcul mécanique de la vitesse sur papier Comparaison réalité Calcul de la vitesse sur logiciel de CAO CDCF Pertinence et nouveautés par rapport aux données. (Vérification sur conception) Différentes solutions Nombres de pertinentes Choix sur critères 2D Dessin ensemble 2D N° et nomenclature Conception biomimétique
 Différentes solutions Nombres de pertinentes Choix sur critères 2D Dessin ensemble 2D N° et nomenclature Conception biomimétique")
4
La fine équipe Corentin Frechet : grand manitou (vraiment tout)
Paul-Antoine Beaudet et Bastien Thonnerieux : responsables conception Benoît Fournier : responsable fabrication Hugo Chuitel : responsable achat Pierre Bourdin : responsable communication Samir Benchekor : fraîchement arrivé de Lyon

5
Cahier des charges Maintien du bouton de la perceuse
Maintien en place de la perceuse Embout adapté à celui de la visseuse Doit avancer droit sur 15m sur une largeur de 1m Doit avancer le plus vite possible Insertion facile de la visseuse dans le robot Adhérence des pattes sur le sol, pas de glissement trop prononcé Ressembler à un être vivant Arrêter rapidement le robot en fin de course Doit assurer la sécurité de l’utilisateur Le marcheur doit être « biomimétique ». Il doit essayer de reproduire la marche d’un être vivant de votre choix. Temps de contact d’une patte au sol <2/3 du temps >1/10 du temps Défaut de planéité du sol <10mm

6
Le marcheur doit être représentatif de GMP
Machines, outils et matériaux utilisables pour la partie mécanique. Machines, outils et matériaux utilisés durant vos autres enseignements Machines et matériaux utilisables pour la partie habillage du robot. Tout dans les limites de sécurité Temps de montage ou démontage pour séparation de la partie mécanique de l’habillage s’il existe (outillage classique) <10 minutes Encombrement, coût et brut Poids final du marcheur <15 kg sans la visseuse Coût total du marcheur en bruts utilisés <30 euros Volume de Prototypage rapide utilisable pour la validation du concept ou éventuellement l’habillage 333 cm3 Coût des éléments du commerce achetés ou récupérés tels que roulement, palier, rotule, vis … (inclure le prix estimé des pièces récupérées ou fournies gratuitement) <50 euros Utilisation de sous-traitance ou récupération de sous ensemble : interdite Le marcheur doit être facilement utilisable Nombre de personnes pour déplacer le robot et lancer la course : 1 Détérioration de la piste (sol avec revêtement plastique) AUCUNE
. <10 minutes. Encombrement, coût et brut. Poids final du marcheur <15 kg sans la visseuse. Coût total du marcheur en bruts utilisés <30 euros. Volume de Prototypage rapide utilisable pour la validation du concept ou éventuellement l’habillage 333 cm3. Coût des éléments du commerce achetés ou récupérés tels que roulement, palier, rotule, vis … (inclure le prix estimé des pièces récupérées ou fournies gratuitement) <50 euros. Utilisation de sous-traitance ou récupération de sous ensemble : interdite. Le marcheur doit être facilement utilisable. Nombre de personnes pour déplacer le robot et lancer la course : 1. Détérioration de la piste (sol avec revêtement plastique) AUCUNE.")
7
Système retenu Robot marcheur à 4 pattes, synchronisée 2 par 2. Avant droit avec arrière gauche et avant gauche avec arrière droite. Deux axes (un avant et un arrière) entraînant chacun deux pattes, celles-ci étant déphasées de 180 degré. Perceuse fixée au « centre » du corps du robot, c’est-à-dire entre les deux axes.
 entraînant chacun deux pattes, celles-ci étant déphasées de 180 degré. Perceuse fixée au « centre » du corps du robot, c’est-à-dire entre les deux axes.")
8
Solutions envisagées Transmission de puissance :
-poulies/courroies : imposent une courroie crantée pour le synchronisme et tendeur de courroie -cascade de pignon : solution trop peu « flexible », nécessite des portées de pignon de qualité -chaîne : solution retenue

9
3D d’ensemble

10
Schéma cinématique

11
Dessin 2D

12
Nomenclature

13
Estimation du coût des éléments du commerce à acheter
Après une étude des différents sites de vente de pièces mécanique nous vous proposons une liste des éléments avec le meilleur rapport qualité prix. Après avoir étudié le sujet, le meilleur rapport qualité prix est de réaliser les éléments mécaniques nous-mêmes. En conséquence, un maximum de pièces seront donc réalisées par nos soins. Nos pignons taillés dans de la tôle à l’aide de la découpe jet d’eau. 5 mètres de chaine simple ISO standard au pas 3/8 ème de pouces. Circlips extérieurs arbre ø 5 ø intérieur 4,7 Epaisseur 0, € TTC (achetés chez Pons et Sabot, grossiste stéphanois) 20 Circlips extérieurs arbre ø 8 ø intérieur 7,4 Epaisseur 0, € TTC (chez Pons et Sabot aussi) Un projet en équipe qui aboutit : ça n’a pas de prix…
 20 Circlips extérieurs arbre ø 8 ø intérieur 7,4 Epaisseur 0, € TTC (chez Pons et Sabot aussi) Un projet en équipe qui aboutit : ça n’a pas de prix…")
14
Calcul de vitesse Couple de 12Nm Vitesse de 300tr/min
Réduction de 3 (pignon de 8 dents et roues de 24 dents) donc vitesse de rotation des axes de 100tr/min, chaque patte fera alors 100 pas par minute
 donc vitesse de rotation des axes de 100tr/min, chaque patte fera alors 100 pas par minute.")
15
Biomimétique Le robot devra ressembler à un être vivant. Nous lui donnerons cette aspect à l’aide d’une coque supérieur couvrant le mécanisme (assurant aussi la protection des utilisateurs). Cette « carrosserie » sera probablement réalisée en fibre de verre, avec un moule en mousse expansée poncée, peinte et décorée. Une autre solution envisagée est de découper plusieurs plaques assemblées ensuite de manière croisé de façon à avoir une forme en 3 dimensions.
. Cette « carrosserie » sera probablement réalisée en fibre de verre, avec un moule en mousse expansée poncée, peinte et décorée. Une autre solution envisagée est de découper plusieurs plaques assemblées ensuite de manière croisé de façon à avoir une forme en 3 dimensions.")
17
Guide de perceuse (unique)
D’abord découpé à la jet d’eau, puis cintré à la plieuse. Le brut est une tôle d’acier d’épaisseur 2 mm. Brut : 175*75*2= 26,25 cm3 Usiné : 10,82 cm3 On utilise 41% du brut initial.

18
Axe principal (par paire)
Le brut est un profilé cylindrique en acier étiré de diamètre 14 mm, de 238 mm de longueur. Réalisé au tour conventionnel, puis les trous de diamètre 3mm sont percés avec la perceuse à colonne. Ce sont ces trous qui assureront le synchronisme et donc la bonne marche de La Bête.

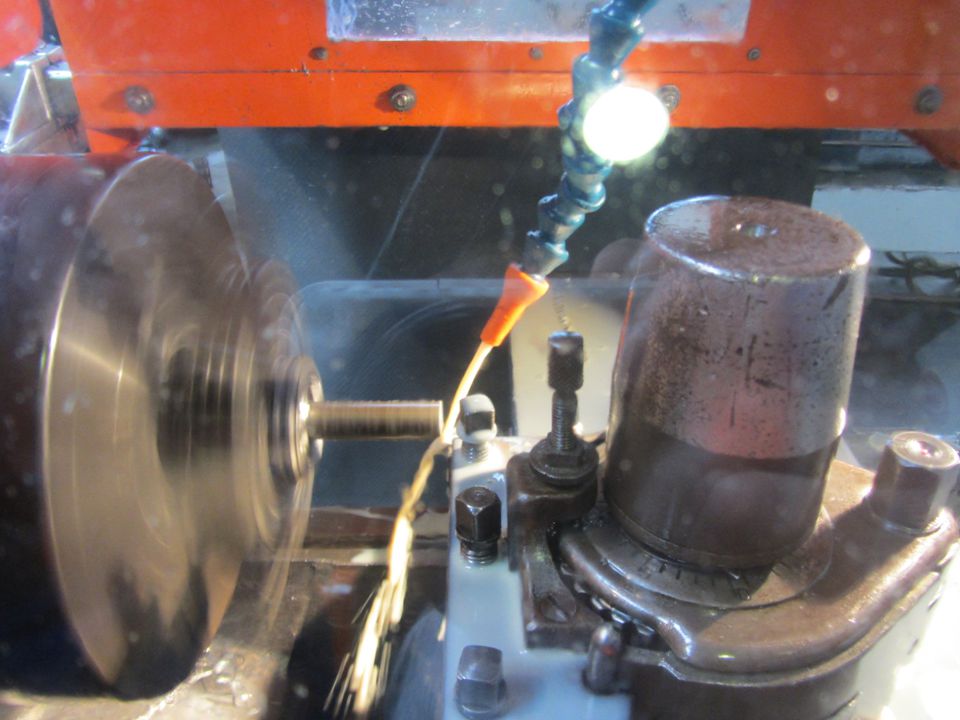
20
Axe Principal en réel

21
Mise en plan

22
Système en 3D

23
Système réel

24
Retrouvez-nous sur : http://bonjourlabete.wordpress.com/
LEQ Nous contacter :

Présentations similaires









>")












