Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Commande d’un Robot Bipède 7DDL
Sébastien DELARUE

2
Plan Modèle Recherche de cycles Limites Semi Passifs
Stabilisation Tronc/Genoux Newton-Raphsen Commande énergétique

3
Modèle q31 q32 q41 q42 -q1 Pente Sol L3 z4 L1 L4 z1 z3 x1 y1 Torse

4
Stabilisation du Tronc
Si le rang de est égal à 1, alors le système est dit fortement couplé inertiellement, c’est une condition de commandabilité.

5
Stabilisation Tronc + genoux
On utilise la même méthode de découplage que précédemment On obtient alors :

6
Trajectoires de stabilisation
Posture 1 , Absolu Angle tronc= constante Angle genou 1 = Angle hanche 1 – ε Angle genou 2 = Angle hanche 2 – ε Posture 2 , Absolu/relatif Trajectoire parabolique du pied de balancement

7
Résultats de Stabilisation

8
Newton-Raphsen La marche sera donc périodique si soit Si maintenant
est une solution alors soit

9
Exemples de Cycles Limites
tronc= rad pente=0.0 rad 4 pas X=[3.297;3.154;3.118;2.984;-0.091;-0.461;0.355;0.074;-0.196;-0.392];

10
Commande énergétique Solution périodique Xo
« Trajectoire » de référence en énergie

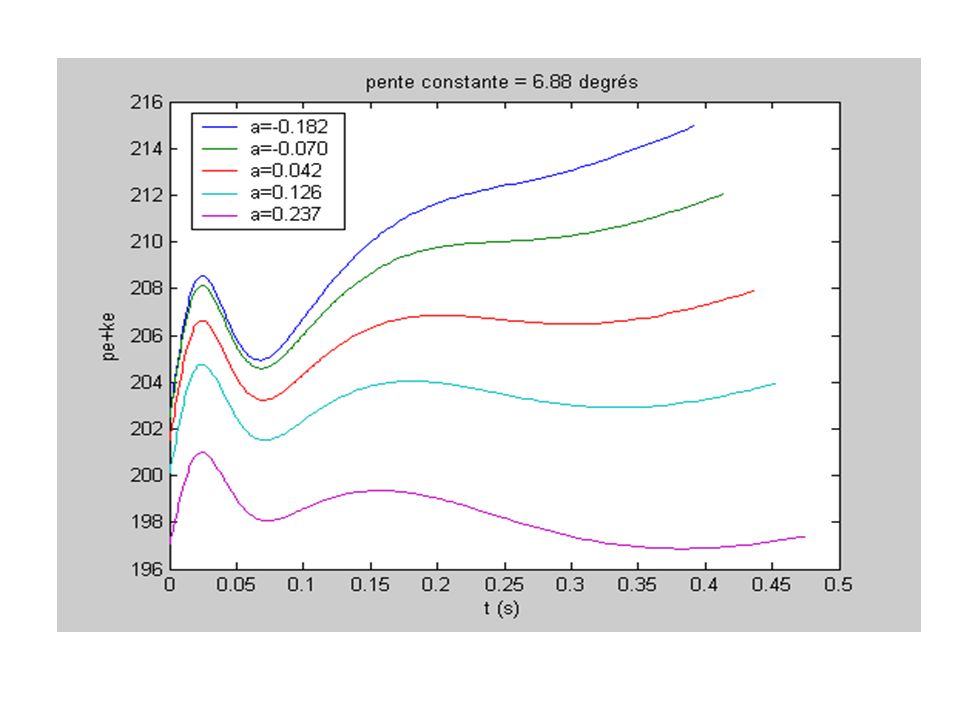
11
Energie Totale

Présentations similaires



 La modélisation moléculaire : optimisation.>")

PRESENTATION avec x, y, z les inconnues.>")













