Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Suivi de trajectoires par vision Y. Goyat, T. Chateau, L. Trassoudaine 1

2
Plan Introduction Principe de la méthode Résultats Perspectives

3
Introduction projet PREDIT SARI Surveillance Automatisée des Routes pour l'Information des conducteurs et des gestionnaires http://www.sari.prd.fr

4
Principe

5
Filtrage temporel Principe Estimation récursive de la densité conditionnelle : État à l’instant tHistorique des mesures

6
Filtrage temporel 2 étapes observation prédiction

7
Filtrage temporel Approximation par une méthode de Monte-Carlo Ensemble de particules avec poids associé Filtre à particules

8
Filtrage temporel

9
Définition de 3 modèles : Modèle d’état Modèle de prédiction Modèle d’observation

10
Vecteur d’état Utilisation d’un modèle bicyclette

11
Vecteur d’état Utilisation d’un modèle bicyclette

12
Modèle de prédiction Lié au modèle bicyclette : période d’échantillonnage

13
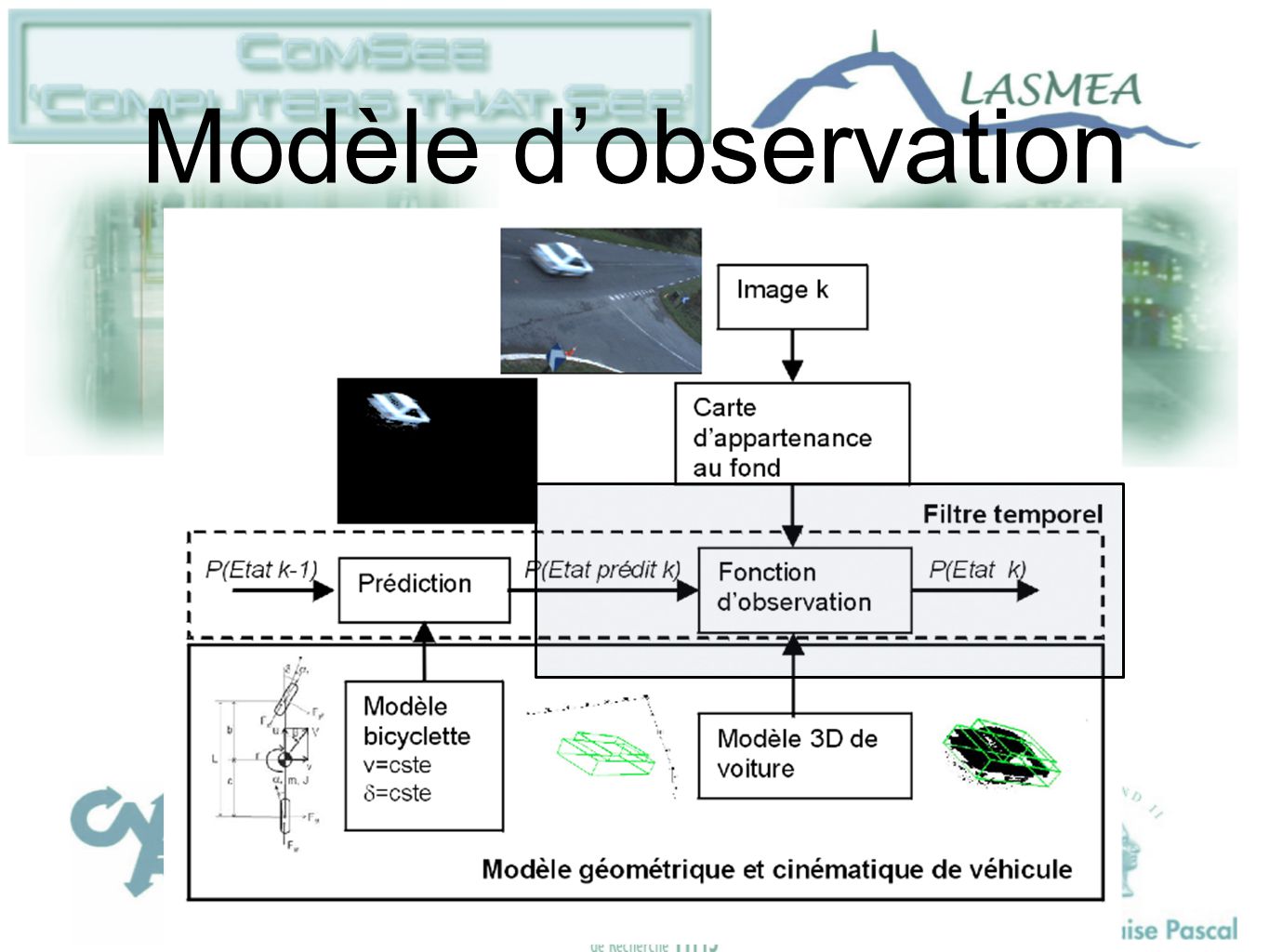
Modèle d’observation

14
Extraction de fond

15
Modèle d’observation

17
Extraction de fond : le vue-mètre Modèle probabiliste : 1 v. aléatoire discrète associée à chaque pixel 2 états possibles : fond ( 1 ) ou forme ( 2 ) Mesures : composantes RVB marginalisation
 ou forme ( 2 ) Mesures : composantes RVB marginalisation.")
18
Extraction de fond : le vue-mètre marginalisation Approximation discrète Fonction de masse Fonction de Kronecker

19
Extraction de fond

20
Extraction de fond : le vue-mètre Mise à jour temporelle du modèle par un paramètre

21
Extraction de fond

22
Modèle 3D de véhicule

23
Calcul du poids associé à une particule Projection dans l’image : poids définit comme la différence entre le nombre de points formes et le nombre de points fond (seuillé pour être positif)
")
24
Calcul du poids Amélioration des temps de calcul 1) : approximation de la projection de modèle 3D par son enveloppe convexe 2) : utilisation d’une image intégrale par ligne
 : approximation de la projection de modèle 3D par son enveloppe convexe 2) : utilisation d’une image intégrale par ligne")
25
Initialisation - Position : recherche du centre d’un amas de points dans l’image- - Orientation, angle volant : prior lié au rayon de courbure du virage - Vitesse : prior lié au virage

26
Résultats Vue de dessus

27
Résultats Modèle étalonné sur véhicule 406

28
Résultats Variation du nombre de particules

29
Résultats Variation du nombre de cubes dans le modèle

30
Conclusion Mise en œuvre d’un système de suivi de trajectoires par vision Précision obtenue de l’ordre de 20 à 40 cm Point critique : extraction fond forme

31
Perspectives Amélioration de l’extraction fond forme Fusion de capteurs (utilisation d’un télémètre laser à balayage)
")
Présentations similaires










 et P. Gonçalvès (Inrialpes)>")








