Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
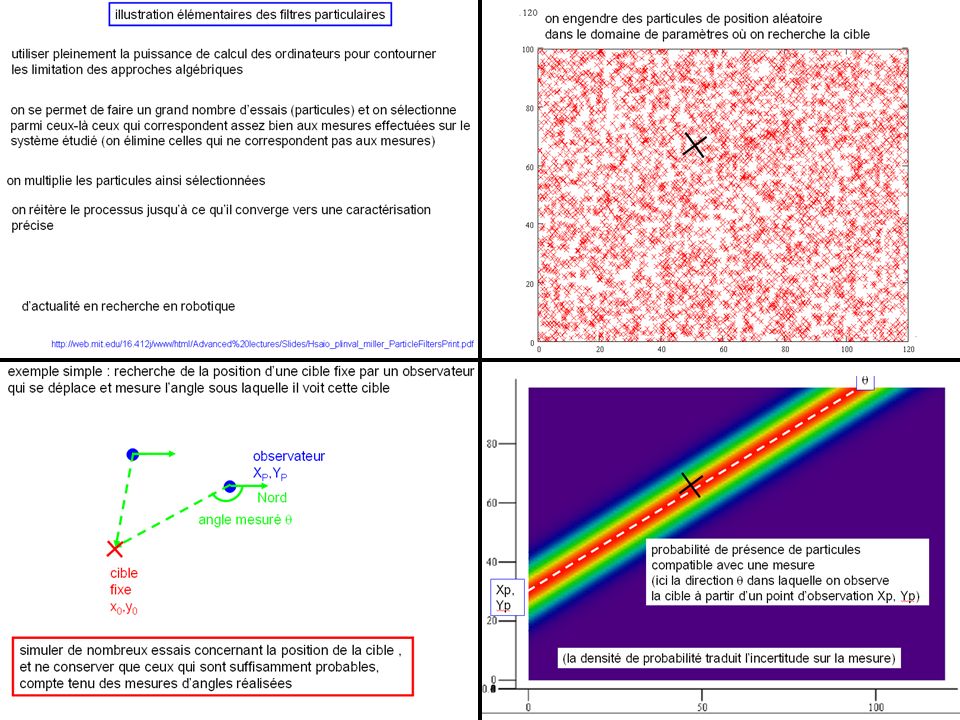
illustration élémentaires des filtres particulaires utiliser pleinement la puissance de calcul des ordinateurs pour contourner les limitation des approches algébriques on se permet de faire un grand nombre dessais (particules) traduisant les évolutions possibles du système étudié et on sélectionne parmi ceux-là ceux qui correspondent assez bien aux mesures effectuées sur le système étudié (on élimine celles qui ne correspondent pas aux mesures) on multiplie les particules ainsi sélectionnées on réitère le processus jusquà ce quil converge vers une caractérisation précise http://web.mit.edu/16.412j/www/html/Advanced%20lectures/Slides/Hsaio_plinval_miller_ParticleFiltersPrint.pdf dactualité en recherche en robotique
 traduisant les évolutions possibles du système étudié et on sélectionne parmi ceux-là ceux qui correspondent assez bien aux mesures effectuées sur le système étudié (on élimine celles qui ne correspondent pas aux mesures) on multiplie les particules ainsi sélectionnées on réitère le processus jusquà ce quil converge vers une caractérisation précise dactualité en recherche en robotique")
2
exemple simple : recherche de la position dune cible fixe par un observateur qui se déplace et mesure langle sous laquelle il voit cette cible Nord observateur X P,Y P cible fixe x 0,y 0 angle mesuré simuler de nombreux essais concernant la position de la cible, et ne conserver que ceux qui sont suffisamment probables, compte tenu des mesures dangles réalisées

3
on engendre des particules de position aléatoire dans le domaine de paramètres où on recherche la cible

4
probabilité de présence de particules compatible avec une mesure (ici la direction dans laquelle on observe la cible à partir dun point dobservation Xp, Yp) Xp, Yp (la densité de probabilité traduit lincertitude sur la mesure)
 Xp, Yp (la densité de probabilité traduit lincertitude sur la mesure)")
5
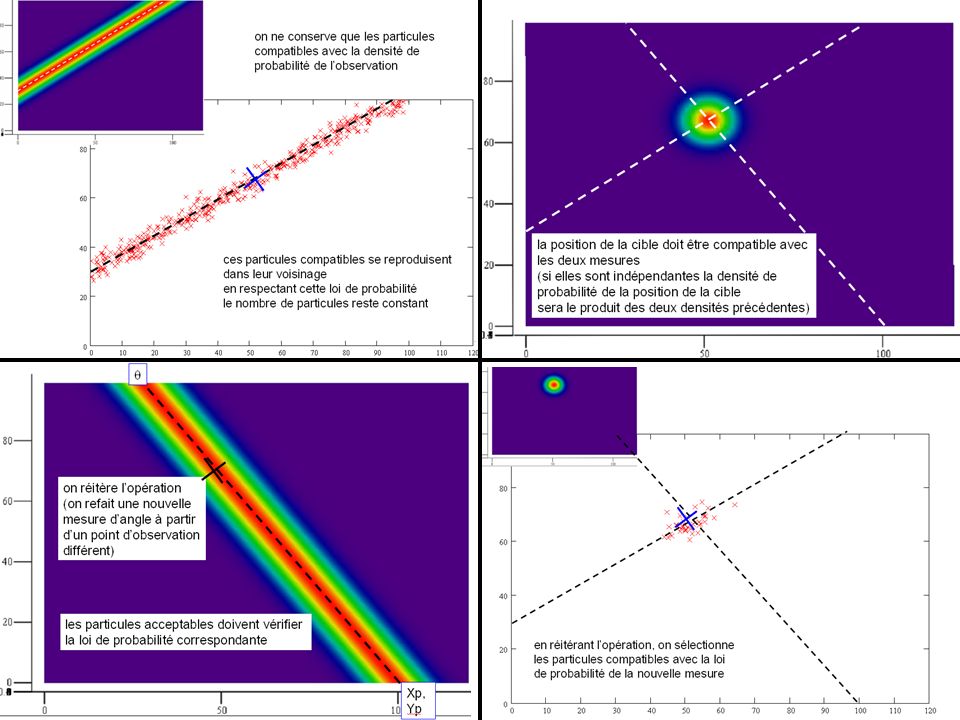
on ne conserve que les particules compatibles avec la densité de probabilité de lobservation ces particules compatibles se reproduisent dans leur voisinage en respectant cette loi de probabilité le nombre de particules reste constant

6
on réitère lopération (on refait une nouvelle mesure dangle à partir dun point dobservation différent) Xp, Yp les particules acceptables doivent vérifier la loi de probabilité correspondante
 Xp, Yp les particules acceptables doivent vérifier la loi de probabilité correspondante")
7
la position de la cible doit être compatible avec les deux mesures (si elles sont indépendantes la densité de probabilité de la position de la cible sera le produit des deux densités précédentes)
")
8
en réitérant lopération, on sélectionne les particules compatibles avec la loi de probabilité de la nouvelle mesure

9
on itère le processus et les caractéristiques de la loi de probabilité du nuage de particules saffinent (lentement, loi en t -1/2 )
")
10
formalisation probabiliste rigoureuse fondée sur les probabilités conditionnelles formule de Bayes, modèles de Markov

11
peut être intéressant lorsque les états caractérisant le système étudié ne peuvent pas être modélisés simplement par des formules analytiques par exemple suivi simultané de plusieurs mobiles prédire la position. la corriger en fonction des mesures. lisser la trajectoire...

Présentations similaires











>")









