Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Plantes Tiré de P. Prusinkiewicz, A. Lindenmayer & J. Hanan, Developmental Models of Herbaceous Plants for Computer Imagery Purposes. SIGGRAPH’88, pp

2
Introduction Les plantes donnent l’impression de manifester une complexité arbitraire tout en possédant une structure arborescente. Elles croissent à partir d’un point source unique en développant au fil du temps une structure arborescente, chacun des éléments de cette structure s’allongeant. Les plantes ont été modélisées essentiellement au moyen de : - systèmes de particules, - fractales, - L-systèmes. L’intention ici n’est pas de présenter une modélisation parfaite sur le plan botanique de plantes données, mais d’expliquer les aspects de la modélisation des plantes. Les plantes sont extrêmement variées et, néanmoins, la plupart d’entre elles partagent des caractéristiques communes. Aspects traités : représentation de la structure statique d’une plante adulte, la modélisation et l’animation du processus de croissance.

3
Exemples de structures arborescentes bidimensionnelles
Tiré de Rick Parent, Animatique Algorithmes et techniques. Vuibert, Paris, 2003.

4
R. Marshall, R.Wilson, W. Carlson, "Procedure models for generating
Travaux réalisés sur la modélisation de représentations statiques de diverses plantes R. Marshall, R.Wilson, W. Carlson, "Procedure models for generating 3D terrain", Proceedings of SIGGRAPH 80, 14(4), p 1. M. Aono and T. L. Kunii, "Botanical Tree Image Generation", IEEE Computer Graphics and Applications, 4(5), p (mai 1984). 2. J. Bloomenthal, "Modeling the Mighty Maple ", Computer Graphics (Proceedings of SIGGRAPH 85), 19(3), p (août 1985). 3. S. Demko et al., "Construction of Fractal Objects with Iterated Function Systems", Computer Graphics (Proceedings of SIGGRAPH 85), 19(3), p (juillet 1985). 4. 5. W.T. Reeves & R. Blau, "Approximate and Probabilistic Algorithms for Shading and Rendering Structured Particle Systems", Proceedings of SIGGRAPH 85, 19(3), p (juillet 1985). 6. P. Oppenheimer, "Real-Time Design and Animation of Fractal Plants and Trees", Computer Graphics (Proceedings of SIGGRAPH 86), 20(4), p (août 1986).
, p M. Aono and T. L. Kunii, Botanical Tree Image Generation , IEEE. Computer Graphics and Applications, 4(5), p (mai 1984). 2. J. Bloomenthal, Modeling the Mighty Maple , Computer Graphics. (Proceedings of SIGGRAPH 85), 19(3), p (août 1985). 3. S. Demko et al., Construction of Fractal Objects with Iterated. Function Systems , Computer Graphics (Proceedings of. SIGGRAPH 85), 19(3), p (juillet 1985) W.T. Reeves & R. Blau, Approximate and Probabilistic Algorithms. for Shading and Rendering Structured Particle Systems , Proceedings. of SIGGRAPH 85, 19(3), p (juillet 1985). 6. P. Oppenheimer, Real-Time Design and Animation of Fractal Plants. and Trees , Computer Graphics (Proceedings of SIGGRAPH 86), 20(4), p (août 1986).")
5
P. Prusinkiewicz, A. Lindenmayer, and J. Hanan, "Developmental
Travaux réalisés sur la modélisation de représentations statiques de diverses plantes 7. P. Prusinkiewicz, A. Lindenmayer, and J. Hanan, "Developmental Models of Herbaceous Plants for Computer Imagery Purposes", Proceedings of SIGGRAPH 88, 22(4), p (août 1988). 8. P. Reffye, C. Edelin, J. Francon, M. Jaeger, and C. Puech, "Plant Models Faithful to Botanical Structure and Development", Proceedings of SIGGRAPH 88, 22(4), p (août 1988). X. G. Viennot et al., "Combinatorial Analysis of Ramified Patterns and Computer Imagery of Trees", Computer Graphics (Proceedings of SIGGRAPH 89), 23(3), p (juillet 1989). 9. N. Greene, "Voxel Space Automata : Modeling with Stochastic Growth Processes in Voxel Space ", Computer Graphics (Proceedings of SIGGRAPH 89), 23(3), p (juillet 1989). 10. 11. P. Prusinkiewicz, M. James, and M. R. Mech, "Synthetic Topiary", Proceedings of SIGGRAPH 94, Computer Graphics Proceedings, Annual Conference Series, p (juillet 1994).
, p (août 1988). 8. P. Reffye, C. Edelin, J. Francon, M. Jaeger, and C. Puech, Plant. Models Faithful to Botanical Structure and Development , Proceedings of SIGGRAPH 88, 22(4), p (août 1988). X. G. Viennot et al., Combinatorial Analysis of Ramified Patterns. and Computer Imagery of Trees , Computer Graphics (Proceedings. of SIGGRAPH 89), 23(3), p (juillet 1989). 9. N. Greene, Voxel Space Automata : Modeling with Stochastic. Growth Processes in Voxel Space , Computer Graphics (Proceedings. of SIGGRAPH 89), 23(3), p (juillet 1989) P. Prusinkiewicz, M. James, and M. R. Mech, Synthetic Topiary , Proceedings of SIGGRAPH 94, Computer Graphics Proceedings, Annual Conference Series, p (juillet 1994).")
6
J. Weber, and J. Penn, "Creation and Rendering of Realistic Trees",
Travaux réalisés sur la modélisation de représentations statiques de diverses plantes 12. J. Weber, and J. Penn, "Creation and Rendering of Realistic Trees", Proceedings of SIGGRAPH 95, (août 95). 13. R. Mech and P. Prusinkiewicz, "Visual Models of Plants Interacting with their Environment", Proceedings of SIGGRAPH 96, p (août 1996). 14. P. Prusinkiewicz, L. Mundermann, R. Karwowski and B. Lane, "The use of positional information in the modeling of plants", Proceedings of SIGGRAPH 2001, 22(4), p (août 2001).
. 13. R. Mech and P. Prusinkiewicz, Visual Models of Plants Interacting. with their Environment , Proceedings of SIGGRAPH 96, p (août 1996). 14. P. Prusinkiewicz, L. Mundermann, R. Karwowski and B. Lane, The use of positional information in the modeling of plants , Proceedings of SIGGRAPH 2001, 22(4), p (août 2001).")
7
Travaux réalisés sur la modélisation et l’animation des plantes
15. P. Prusinkiewicz and A. Lindenmayer, "The Algorithmic Beauty of Plants", Springer-Verlag, New York, 1990. 16. P. Prusinkiewicz, M. Hammel, and E. Mjolsness, "Animation of Plant Development", Proceedings of SIGGRAPH 93, p (août 1993). 17. O. Deussen, P. Hanrahan, B. Lintermann, R. Mech, M. Pharr and P. Prusinkiewicz, "Realistic modeling and rendering of plant ecosystems", Proceedings of SIGGRAPH 98, p (juillet 1998).
. 17. O. Deussen, P. Hanrahan, B. Lintermann, R. Mech, M. Pharr and P. Prusinkiewicz, Realistic modeling and rendering of plant ecosystems , Proceedings of SIGGRAPH 98, p (juillet 1998).")
8
Quelques notions de botanique
Utiles lorsqu’on cherche à modéliser et animer des plantes d’allure réaliste, dans la mesure où elles traitent des caractéristiques visuelles des plantes. On distingue les plantes herbacées et les plantes ligneuses. Plus petites, plus légères (les fougères ou les mousses), arborescences plus régulières et moins soumises aux effets de l’environnement. Plantes de plus grande taille dont les branches sont plus lourdes, plus indépendantes d’un point de vue structurel, et ont tendance à s’entre- mêler et à se gêner mutuellement. Les branches sont plus largement soumises aux effets du vent, de la gravité et du rayonnement solaire.
, arborescences. plus régulières et moins soumises aux effets de l’environnement. Plantes de plus grande taille dont les branches sont plus lourdes, plus. indépendantes d’un point de vue structurel, et ont tendance à s’entre- mêler et à se gêner mutuellement. Les branches sont plus largement soumises aux effets du vent, de la. gravité et du rayonnement solaire.")
9
Voyons donc les composantes structurelles des plantes :
les tiges les racines les bourgeons les feuilles les fleurs Aucun intérêt pour la modélisation des aspects visuels; elles n’ont pas été pris en compte. Les tiges croissent généralement verticalement et portent des feuilles. Les feuilles sont attachées à des nœuds placés le long des tiges selon un schéma régulier.

10
Tiré de Jean-Claude Corbeil et Ariane Archambault, Dictionnaire Thématique Visuel Français/Anglais.
Québec Amérique, 1987.

11
Tiré de Jean-Claude Corbeil et Ariane Archambault, Dictionnaire Thématique Visuel Français/Anglais.
Québec Amérique, 1987.

12
Tiré de Jean-Claude Corbeil et Ariane Archambault,
Dictionnaire Thématique Visuel Français/Anglais. Québec Amérique, 1987.

13
Quelques définitions :
Les parties de tige situées entre les nœuds sont appelées entrenoeuds. Une ramification est une tige secondaire produite à partir d’une tige principale (l’axe) . Ramification par dichotomie : séparation de la tige principale en 2 tiges de croissance égale. Ramification monopode : une tige se développe latéralement à partir de l’axe principal pendant que cet axe continue à pousser dans sa direction d’origine. Les bourgeons sont l’état embryonnaire des tiges, des feuilles et des fleurs. à fleur végétatifs (deviennent des tiges ou des feuilles) terminal (à l’extrémité d’une tige) vs latéral (qui pousse sur une tige)
 . Ramification par dichotomie : séparation de la tige principale en 2 tiges de croissance égale. Ramification monopode : une tige se développe latéralement à partir de l’axe principal. pendant que cet axe continue à pousser dans sa direction. d’origine. Les bourgeons sont l’état embryonnaire. des tiges, des feuilles et des fleurs. à fleur. végétatifs. (deviennent des tiges ou des feuilles) terminal (à l’extrémité d’une tige) vs latéral (qui pousse sur une tige)")
14
Note : Ce ne sont pas tous les bourgeons qui se développent. Le cas échéant, ils sont qualifiés de dormants. Dans le cas des plantes ligneuses, ils peuvent redevenir actifs pour produire des jeunes pousses dans une zone de croissance ancienne d’un arbre. Modes d’organisation des feuilles sur une tige : 1. Mode alterné : Les feuilles poussent de part et d’autre de la tige de manière alternée. 2. Mode opposé : Une paire de feuilles apparaît au même point d’une tige mais de part et d’autre de celle-ci. 3. Mode verticille : Trois feuilles ou plus poussent en rayon à partir d’un nœud.

15
Influences principales lors de la croissance d’une plante :
1. la lignée : Désigne la croissance contrôlée par l’âge de la cellule. Les cellules plus anciennes sont plus grandes que les plus jeunes. 2. la descendance cellulaire : Désigne la transmission de produits nutritifs et d’hormones à des cellules adjacentes. Les extrémités de certaines plantes poussent plus que des parties intérieures. 3. les tropismes : Influences externes qui modifient la direction de croissance d’une plante. phototropisme : courbure d’une tige en direction de la lumière géotropisme : réaction d’une tige à la gravité

16
4. les obstacles physiques :
Peuvent également avoir une incidence sur la forme et la croissance des plantes.

17
Les premiers modèles (les pionniers)
Modèle en fil de fer : Honda(1971) Modèle géométrique : un arbre binaire parfait avec des rapports de diminution des longueurs des branches, des angles d’embranchement aux différents nœuds.
 Modèle géométrique : un arbre binaire parfait avec des rapports de diminution des. longueurs des branches, des angles d’embranchement aux. différents nœuds.")
18
Modèle procédural de Marshall et al. (1980)
Les paramètres suivants sont proposés pour ce modèle : le nombre de feuilles, la grandeur de chaque branche, la description de chaque feuille, la couleur, la position de l’arbre, la grandeur de chaque feuille, la distance entre les branches, la distance entre les feuilles. Ces paramètres peuvent être vus comme des variables aléatoires.

19
Modèle d’objets en spirale : Kawaguchi(SIGGRAPH 1982)
S’intéresse à la morphologie des objets tels que les coquillages, les plantes en spirale, etc. Approche récursive de construction à partir de formes géométriques simples. La position et la taille relatives de la base supérieure p/r à la base inférieure doivent être fournies.

20
Générateur de courbes fractales
générateur forme initiale arbre fractale

21
Exemple simple de générateur :

22
Illustration :

23
Systèmes de fonctions itératives S. Demko et al.(85)
On utilise des transformations linéaires pour définir chaque partie auto-similaire d’une fractale.

24
Peter E. Oppenheimer(86) Combine les travaux de Kawaguchi avec les méthodes fractales.
 Combine les travaux de Kawaguchi avec les méthodes fractales.")
25
Modèle issu d’un squelette : Bloomenthal (SIGGRAPH 1985)
Ce modèle issu d’un arbre préalablement défini est construit en interpolant chaque suite de n arêtes à l’aide de courbes B-splines par exemple. La modélisation volumique d’un embranchement est réalisée en considérant un cylindre généralisé dont l’axe est la courbe B-spline et dont la section est un cercle de rayon variable. Segments de droite Splines

26
Modèle de particules [Reeves & Blau (85)]
![Modèle de particules [Reeves & Blau (85)]](http://slideplayer.fr/slide/1534513/4/images/26/Mod%C3%A8le+de+particules+%5BReeves+%26+Blau+%2885%29%5D.jpg "Modèle de particules [Reeves & Blau (85)]")
27
Les L-systèmes (systèmes de réécriture parallèles)
Des modèles mathématiques pour le développement de plantes élaborés par le biologiste Aristide Lindenmayer d’où le L dans L-systèmes. Le modèle le plus simple : le DOL-système Les productions sont indépendantes du contexte. déterministe Il s’agit d’un jeu de règles de production de la forme i i dans laquelle i, le prédécesseur, est un symbole unique, et i, le successeur, est une séquence de symboles. Dans les L-systèmes déterministes, i n’apparaît qu’une seule fois dans la partie gauche d’une règle de production.

28
Procédure de réécriture
Une séquence d’un ou plusieurs symboles est donnée comme chaîne initiale, ou axiome. Une règle de production peut être appliquée à la chaîne si sa partie gauche apparaît dans la chaîne. L’application d’une règle de production à une chaîne entraîne que l’occurrence de i dans la chaîne se réécrit sous la forme i. Les règles de production sont appliquées parallèlement à la chaîne initiale. Les symboles de la chaîne qui ne se trouvent pas dans la partie gauche d’une règle de production sont supposés être exploités par la règle de production d’identité i i. L’application parallèle de règles de production produit une nouvelle chaîne. Ces règles sont alors à nouveau appliquées à cette nouvelle chaîne. Ce processus se répète jusqu’à ce qu’il n’y ait plus d’occurrences de partie gauche d’une règle de production dans la chaîne.

29
Exemple simple d’un DOL-système
Règles de production S ABA A XX B TT Séquence de chaîne S axiome ABA XXTTXX

30
Interprétation géométrique des L-systèmes
Pour produire des images à partir de ces chaînes, il faut les interpréter géométriquement. Deux façons de faire : le remplacement géométrique les tracés de tortue. le remplacement géométrique d’une chaîne Chaque symbole est remplacé par un élément géométrique. Exemple : La chaîne XXTTXX peut être interprétée en substituant chaque occurrence de X par un segment de droite et chaque occurrence de T par une forme en V de sorte que le haut du V soit aligné avec les points d’extrémité des éléments géométriques placés de part et d’autre de ce dernier.

31
XXTTXX Chaîne X : T : Règles de remplacement géométrique Interprétation géométrique

32
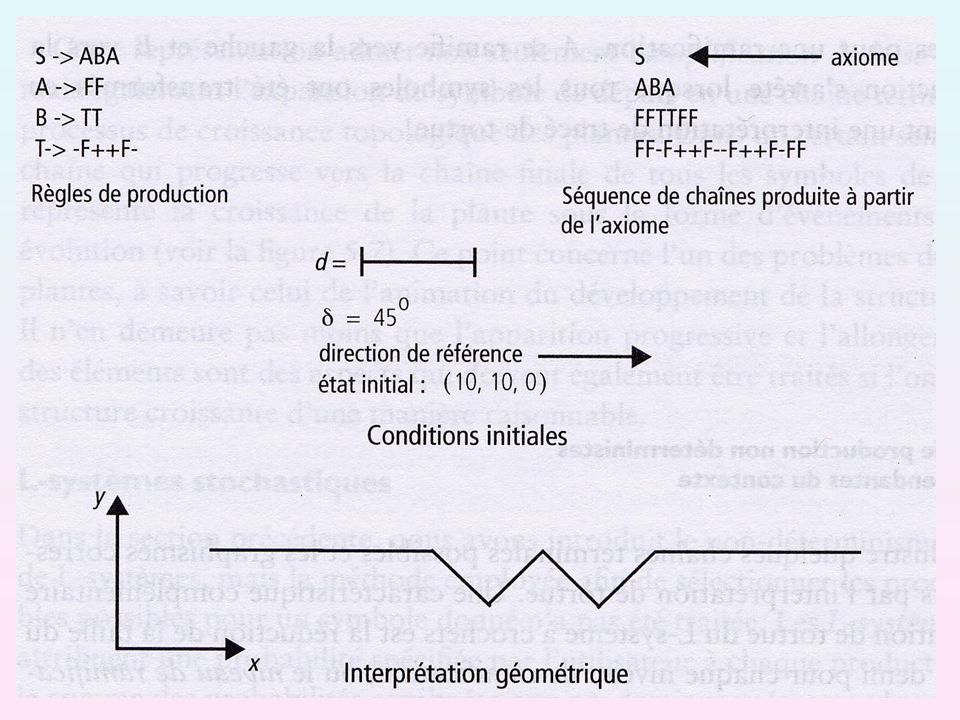
les tracés de tortue d’une chaîne
Il s’agit d’interpréter les symboles de la chaîne sous la forme de commandes de tracé transmises à un curseur simple appelé tortue. État de la tortue : un triplet (x, y, ) désignant sa position 2D et son orientation. Paramètres système d et spécifiés par l’utilisateur : dimension des pas linéaire et de rotation. Extension : L’état de la tortue peut être défini à l’aide d’une position et d’une orientation 3D dans un système de référence.
 désignant sa position 2D et. son orientation. Paramètres système d et spécifiés par l’utilisateur : dimension des pas linéaire et de rotation. Extension : L’état de la tortue peut être défini à l’aide d’une position et. d’une orientation 3D dans un système de référence.")
34
L-systèmes à crochets Les DOL-systèmes sont intrinsèquement linéaires. Pour représenter la structure arborescente des plantes, on introduit un mécanisme permettant de représenter plusieurs segments attachés à l’extrémité d’un segment unique. Des crochets sont utilisés pour indiquer le début et la fin de nouvelles branches provenant de la lignée principale. L’état de la tortue est défini par la position et l’orientation courantes de la tortue. Cela permet de représenter une ramification à partir d’une tige et de créer une structure arborescente d’une profondeur arbitraire.

35
Exemple d’un L-système à crochets :
Règles de production non déterministes et indépendantes du contexte S FAF A [+FBF] non déterministes (plusieurs règles avec une partie gauche identique) A F B [-FBF] B F L’une de ces règles est choisie au hasard dans le jeu de règles chaque fois que la partie gauche doit être remplacée. S est le symbole de départ. A et B représentent des positions possibles pour une ramification où A se ramifie vers la gauche et B vers la droite. La production s’arrête lorsque tous les symboles ont été transformés en symboles possédant une interprétation de tracé de tortue.
 A F. B [-FBF] B F. L’une de ces règles est choisie au hasard dans le jeu de règles. chaque fois que la partie gauche doit être remplacée. S est le symbole de départ. A et B représentent des positions possibles pour une ramification où. A se ramifie vers la gauche et B vers la droite. La production s’arrête lorsque tous les symboles ont été transformés. en symboles possédant une interprétation de tracé de tortue.")
36
Exemple d’un L-système à crochets :
Quelques chaînes terminales possibles :

37
Extensions : La longueur du pas de tracé peut dépendre du niveau de ramification (le nombre d’états sur la pile). Le L-système à crochets peut être étendu de façon à inclure des symboles d’attributs qui contrôlent explicitement la longueur, la largeur et la couleur de la ligne, etc. La séquence de chaînes qui progresse vers la chaîne finale représente la croissance de la plante sous la forme d’événements discrets de son évolution. Séquence de chaînes

38
L-systèmes stochastiques
Comment sélectionner parmi les productions applicables possibles pour un symbole donné ? Il s’agit d’attribuer une probabilité spécifiée par l’utilisateur à chaque production, de sorte que la somme des probabilités attribuées aux productions présentant le même côté gauche s’élève à 1. Exemple d’un L-système stochastique : S1,0 FAF A0,8 [+FBF] A0,2 F B0,4 [-FBF] B0,6 F Cela permet de produire une large variété de structures arborescentes qui manifesteront un air de famille.

39
L-systèmes sensibles au contexte
Ils ajoutent la possibilité de spécifier un contexte dans lequel les parties gauche et droite doivent apparaître pour que la règle de production soit applicable. un seul symbole de contexte à droite un symbole de contexte à gauche et un à droite F < A > T [+FBF] En général, cela peut être étendu à n symboles de contexte à gauche et m symboles de contexte à droite dans la production: L(n, m)-systèmes.
-systèmes.")
40
Animation de la croissance d’une plante
3 types d’animation de plantes : mouvement de la structure de la plante réagissant à des forces externes Exemple : Une plante soumise à un vent fort. animation propre aux plantes et reliée au processus de croissance : les modifications de topologie se produisant au cours de la croissance, Cela est déjà pris en compte par les L-systèmes précé- dents par l’application d’une production renfermant une structure arborescente comme dans A F[+F]B. l’allongement de structures existantes. Cela peut être modélisé par des productions de la forme F FF.

41
Introduction aux L-systèmes paramétriques
Modéliser l’allongement de cette façon pose un problème : la croissance est découpée en unités égales à la longueur de la primitive de tracé représentée par F. Un segment internodal peut être amené à croître d’une manière arbitrairement longue. Il manque un critère de terminaison du processus de croissance à la règle de production F FF. On peut introduire des symboles de tracés additionnels de longueurs différentes pour représenter les étapes successives du processus d’allongement : F0 F1, F1 F2, F2 F3, etc. Cela entraîne une multiplication de symboles et de productions. Pour éviter ceci, la longueur de l’opération de tracé est représentée sous la forme de paramètres avec le symbole de tracé.

42
L-systèmes paramétriques
On peut associer un ou plusieurs paramètres aux symboles; ces paramètres peuvent servir à fixer l’état de la tortue. Ces paramètres peuvent être définis ou modifiés par les productions du L-système. Des expressions conditionnelles renfermant des valeurs paramétriques peuvent être associées aux productions. La production est applicable uniquement si sa condition associée est remplie. Exemple : Le symbole A possède un paramètre associé. S A(0) A(t) F [+A(t )] A(t) : t >=1,0 F Les productions créent le symbole A avec une valeur paramétrique de 0; puis, l’augmentent par sauts de 0,01 jusqu’à atteindre 1,0. À ce stade, le symbole se transforme en un F.
 A(t) F [+A(t )] A(t) : t >=1,0 F. Les productions créent le symbole A avec une valeur paramétrique. de 0; puis, l’augmentent par sauts de 0,01 jusqu’à atteindre 1,0. À ce stade, le symbole se transforme en un F.")
43
L-systèmes paramétriques sensibles au contexte
La combinaison des systèmes sensibles au contexte aux systèmes paramétriques permet la transmission d’informations le long de la structure (transmission de substances nutritives le long de la tige). Exemple : S A(1) B(3) A(5) A(x)0,4 A(x + 1) A(x)0,6 B(x - 1) A(x) < B(y) > A(z) : y < 4 B(x + z) [A(y)] ce qui pourrait donner : A(1) B(3) A(5) A(2) B(6) [A(3)] B(4)
. Exemple : S A(1) B(3) A(5) A(x)0,4 A(x + 1) A(x)0,6 B(x - 1) A(x) < B(y) > A(z) : y < 4 B(x + z) [A(y)] ce qui pourrait donner : A(1) B(3) A(5) A(2) B(6) [A(3)] B(4)")
44
L-systèmes temporisés
2 concepts supplémentaires sont introduits : une variable temporelle globale accessible à toutes les productions aide à contrôler l’évolution de la chaîne, une valeur d’âge locale associée à chaque symbole. Une production d’un L-système temporisé a la forme suivante : (0 0) ((1 1) , (2 2) , …, (n n)) Le symbole 0 se voit attribuer un âge terminal 0. Chaque symbole i se voit attribuer un âge initial i (i > i). Une production temporisée peut être appliquée au symbole correspondant lorsque l’âge terminal du symbole est atteint.
 ((1 1) , (2 2) , …, (n n)) Le symbole 0 se voit attribuer un âge terminal 0. Chaque symbole i se voit attribuer un âge initial i (i > i). Une production temporisée peut être appliquée au symbole. correspondant lorsque l’âge terminal du symbole est atteint.")
45
L-systèmes temporisés
Procédure à suivre : Quand un nouveau symbole est généré, sa valeur d’âge est initialisée à sa valeur de départ. À mesure que le temps global progresse à partir de ce point, l’âge local du symbole augmente jusqu’à ce que l’âge terminal soit atteint. À ce stade, une production lui est appliquée et il est remplacé par de nouveaux symboles. L’interprétation géométrique de chaque symbole est potentiellement basée sur l’âge local de ce symbole. Exemple : L’apparition de bourgeons et de tiges peut être modélisée en fonction de leur âge local. Une chaîne est dérivée d’un axiome en passant d’un âge terminal à un autre. À chaque instant, la production à appliquer en premier est celle dont le symbole de prédécesseur présente la différence la plus faible entre l’âge terminal et l’âge local.

46
L-systèmes temporisés
Exemple simple : On peut considérer : - le symbole A comme une graine, - le symbole S comme un segment de tige internoeuds, - le symbole B comme un bourgeon se transformant en tige, axiome : (A, 0) (A, 3) (S, 0) [+(B, 0)] (S, 0) (B, 2) (S, 0) Après 3 unités de temps, la graine devient un segment de tige, un bourgeon latéral et un autre segment de tige. Après 2 unités de temps supplémentaires, le bourgeon se transforme en un segment de tige.
 (A, 3) (S, 0) [+(B, 0)] (S, 0) (B, 2) (S, 0) Après 3 unités de temps, la graine devient un segment de tige, un. bourgeon latéral et un autre segment de tige. Après 2 unités de temps supplémentaires, le bourgeon se transforme. en un segment de tige.")
47
Interaction avec l’environnement
(L-systèmes ouverts) L’environnement peut avoir diverses influences sur la croissance d’une plante : influences locales obstacles physiques, y compris d’autres plantes ou des parties de la plante elle-même. influences globales quantité de lumière du soleil, longueur des journées, gravité, vent, éléments nutritifs, humidité du sol. Des termes de la forme ?E(x1, x2, …, xm) sont utilisés pour transmettre des informations ainsi que pour demander des informations à l’environnement. P. Prusinkiewicz, M. James, and M. R. Mech, "Synthetic Topiary", Proceedings of SIGGRAPH 94, Computer Graphics Proceedings, Annual Conference Series, p (juillet 1994).
 L’environnement peut avoir diverses influences sur la croissance. d’une plante : influences locales. obstacles physiques, y compris d’autres plantes ou des parties. de la plante elle-même. influences globales. quantité de lumière du soleil, longueur des journées, gravité, vent, éléments nutritifs, humidité du sol. Des termes de la forme E(x1, x2, …, xm) sont utilisés pour. transmettre des informations ainsi que pour demander des informations. à l’environnement. P. Prusinkiewicz, M. James, and M. R. Mech, Synthetic Topiary , Proceedings of SIGGRAPH 94, Computer Graphics Proceedings, Annual Conference Series, p (juillet 1994).")
48
Quelques illustrations …
Tiré de P. Prusinkiewicz, A. Lindenmayer & J. Hanan, Developmental Models of Herbaceous Plants for Computer Imagery Purposes. SIGGRAPH’88, pp

49
Tiré de. P. Prusinkiewicz, A. Lindenmayer & J
Tiré de P. Prusinkiewicz, A. Lindenmayer & J. Hanan, Developmental Models of Herbaceous Plants for Computer Imagery Purposes. SIGGRAPH’88, pp

50
Tiré de. P. Reffye, C. Edelin, J. Francon, M. Jaeger, and C
Tiré de P. Reffye, C. Edelin, J. Francon, M. Jaeger, and C. Puech, "Plant Models Faithful to Botanical Structure and Development", Proceedings of SIGGRAPH 88, 22(4), p (août 1988).
, p (août 1988).")
51
Tiré de. P. Reffye, C. Edelin, J. Francon, M. Jaeger, and C
Tiré de P. Reffye, C. Edelin, J. Francon, M. Jaeger, and C. Puech, "Plant Models Faithful to Botanical Structure and Development", Proceedings of SIGGRAPH 88, 22(4), p (août 1988).
, p (août 1988).")
52
Compétition pour la lumière
Plante grimpante Tiré de R. Mech and P. Prusinkiewicz, "Visual Models of Plants Interacting with their Environment", Proceedings of SIGGRAPH 96, p (août 1996).
.")
53
Simulation d’un écosystème
Tiré de O. Deussen, P. Hanrahan, B. Lintermann, R. Mech, M. Pharr and P. Prusinkiewicz, "Realistic modeling and rendering of plant ecosystems", Proceedings of SIGGRAPH 98, p (juillet 1998).
.")
54
Conclusion Cette présentation est incomplète et il reste beaucoup à faire : Présence d’ombrage Regroupement d’arbres, simulation d’un écosystème Génération d’arbres 3D Présence de sources lumineuses, différentes teintes de couleur, textures Élimination des parties cachées Intégration d’une scène d’arbres naturels à d’autres éléments Croissance animée des arbres dL-systèmes : des L-systèmes renfermant des équations différentielles décrivant certains aspects continus du développement des plantes. Exemple : développement graduel d’un entre-noeuds. etc.

Présentations similaires