Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Principe d’inertie, centre de masse
L’invariance galiléenne impose que les lois de la mécanique classique sont les mêmes dans tous les référentiels en translation uniforme (vitesse constante et sans rotation). Ces référentiel sont appelés référentiels d’inertie ou référentiel galiléen. Nous admettrons comme postulat de base qu’il existe des référentiels d’inertie pour lesquels les lois de la mécanique de Newton s’appliquent. Si on ignore les effets de la rotation de la Terre, un référentiel lié à la Terre peut être considéré comme un référentiel d’inertie. Si on veut tenir compte de la rotation de la Terre, il faut choisir un repère fixe par rapport aux astres.
. Ces référentiel sont appelés référentiels d’inertie ou référentiel galiléen. Nous admettrons comme postulat de base qu’il existe des référentiels d’inertie pour lesquels les lois de la mécanique de Newton s’appliquent. Si on ignore les effets de la rotation de la Terre, un référentiel lié à la Terre peut être considéré comme un référentiel d’inertie. Si on veut tenir compte de la rotation de la Terre, il faut choisir un repère fixe par rapport aux astres.")
2
Quantité de mouvement, principe d’inertie
La quantité de mouvement d’un point matériel de masse m et de vitesse v est : p = m v Pour un système de N points matériels de masse mi et de vitesse vi , la quantité de mouvement totale est : Principe d’inerties (1ère loi de Newton) Dans un référentiel d’inertie, un système isolé (qui n’est soumis à aucune force extérieure et n’est soumis qu’aux forces intérieures entre points matériels du système), la quantité de mouvement totale p est constante, soit :
 Dans un référentiel d’inertie, un système isolé (qui n’est soumis à aucune force extérieure et n’est soumis qu’aux forces intérieures entre points matériels du système), la quantité de mouvement totale p est constante, soit :")
3
Exemples de chocs et d’explosions :
Choc élastique (horizontal) : l’énergie est conservée m1 v1 m2 v2 = 0 En fonction des valeurs des masses, on a : m1 v’1 m2 v’2 m1 > m2 m1 v’1=0 m2 v’2 m1 = m2 m1 v’1 m2 v’2 m1 < m2
 : l’énergie est conservée. m1. v1. m2. v2 = 0. En fonction des valeurs des masses, on a : m1. v’1. m2. v’2. m1 > m2. m1. v’1=0. m2. v’2. m1 = m2. m1. v’1. m2. v’2. m1 < m2.")
4
Avant le choc Après le choc
Choc complètement inélastique ou choc mou : l’énergie n’est pas conservée Avant le choc m1 v1 m2 v2 = 0 Après le choc (m1+m2) v’1 Les deux mobiles restent « collés » après le choc mou, la vitesse de l’ensemble est plus faible que la vitesse incidente de m1.
 v’1. Les deux mobiles restent « collés » après le choc mou, la vitesse de l’ensemble est plus faible que la vitesse incidente de m1.")
5
explosion (m1+m2) v=0 m1 m2 v1 v2 Avant l’explosion l’ensemble est au repos, la quantité de mouvement est nulle. Après l’explosion les deux fragments acquièrent des quantités de mouvement p1 et p2 dont la somme vectorielle reste nulle Si l’énergie disponible pour « l’explosion est Edispo, les fragments 1 et 2 se partagent cette énergie :

6
Fusée La fusée de masse au départ Mo éjecte une masse de gaz a par unité de temps à la vitesse vgaz constante par rapport à la fusée. V(t) La variation de masse de la fusée est : À l’instant t, la quantité de mouvement de la fusée est : vgaz gaz À l’instant t+dt, la quantité de mouvement de la fusée est : La vitesse du gaz dans le référentiel terrestre est , la quantité de mouvement totale du système fusée + gaz à l’instant t+dt est : La conservation de la quantité de mouvement implique que : Soit en regroupant :
 La variation de masse de la fusée est : À l’instant t, la quantité de mouvement de la fusée est : vgaz. gaz. À l’instant t+dt, la quantité de mouvement de la fusée est : La vitesse du gaz dans le référentiel terrestre est , la quantité de mouvement totale du système fusée + gaz à l’instant t+dt est : La conservation de la quantité de mouvement implique que : Soit en regroupant :")
7
Centre de masse Soit un système de points matériels Mi de masse mi et de rayon vecteur ri = OMi. M1 M4 Mi M2 M3 r1 r3 r2 ri r4 O Le centre de masse est le point G défini par où M est la masse totale du système Remarque On a aussi

8
Exemples : Trois masses alignées, m1 = 2m ; m2 = 3m et m3 = m, sont situées respectivement à 1m ; 6m et 10m d’une origine O. O 2 m 3 m m G Soit : x y O Nous cherchons la position du centre de masse d’un demi disque homogène, de masse par unité de surface r et de rayon R. le disque est assimilé à un ensemble de masses élémentaires dmi telles que : r dr rdq G

9
Mouvement du centre de masse
O est un point fixe du référentiel d’inertie, la vitesse du point G est appelée vitesse du centre de masse La quantité de mouvement du centre de masse est la quantité de mouvement totale du système de masse totale M. Pour un système isolé et par conséquent sont constant. Exemple : explosion Si le système est isolé, après l’explosion la vitesse du centre de masse est égale à la vitesse du système avant l’explosion : G

10
Lois de Newton Principe d ’inertie
quantité de mouvement Principe fondamental de la dynamique Principe d ’action et de réaction Exemples de forces gravitation poids frottements

11
Jusqu'à présent nous avons défini comment la position et le mouvement d'une particule matérielle pouvait être défini. Nous allons maintenant rechercher pourquoi cette particule a un tel mouvement. Principe d'inertie (1ère loi de Newton): il existe des référentiels dits référentiels d'inertie ou de Galilée, dans lesquels un point matériel isolé ( la force ou la résultante de toutes les forces qui lui sont appliquées est nulle) conserve indéfiniment son état de mouvement: s'il est au repos il reste au repos s'il est en mouvement, c'est un mouvement rectiligne uniforme c'est à dire que la quantité de mouvement de cette particule est constante de même que son moment cinétique.
: il existe des référentiels dits référentiels d inertie ou de Galilée, dans lesquels un point matériel isolé ( la force ou la résultante de toutes les forces qui lui sont appliquées est nulle) conserve indéfiniment son état de mouvement: s il est au repos il reste au repos. s il est en mouvement, c est un mouvement rectiligne uniforme. c est à dire que la quantité de mouvement de cette particule est constante de même que son moment cinétique.")
12
Remarques: Le mouvement d'une particule n'est défini que par rapport à un référentiel, ce référentiel doit lui-même être un référentiel d'inertie ou de Galilée (en translation rectiligne uniforme ou immobile). La Terre étant en rotation (autour de son axe et autour du soleil) et soumise aux interactions avec d'autre corps célestes, n'est pas un référentiel d'inertie. En pratique, l'accélération due à la rotation étant faible (0,6 cm/s2) et en négligeant les interactions avec la Lune et le Soleil, on pourra en première approximation considérer la Terre comme un référentiel d'inertie. Un référentiel lié au Soleil ne serait pas non plus un vrai référentiel d'inertie car il décrit un mouvement de rotation autour du centre de la galaxie, son accélération d'entraînement est cependant très faible ( cm/s2)
. La Terre étant en rotation (autour de son axe et autour du soleil) et soumise aux interactions avec d autre corps célestes, n est pas un référentiel d inertie. En pratique, l accélération due à la rotation étant faible (0,6 cm/s2) et en négligeant les interactions avec la Lune et le Soleil, on pourra en première approximation considérer la Terre comme un référentiel d inertie. Un référentiel lié au Soleil ne serait pas non plus un vrai référentiel d inertie car il décrit un mouvement de rotation autour du centre de la galaxie, son accélération d entraînement est cependant très faible ( cm/s2)")
13
Principe Fondamental de la dynamique ( 2ème loi de Newton):
Si la quantité de mouvement d'un point matériel varie au cours du temps cela veut dire que cette particule n'est pas isolée. Elle est soumise à une Force égale à la variation de la quantité de mouvement par unité de temps: Si le moment cinétique d'une particule par rapport à un point O quelconque varie au cours du temps cela veut dire qu'elle est soumise à un couple de forces (qui la mette en rotation) égal à la variation du moment cinétique par unité de temps. Ce couple est le moment d'une force appliquée à la particule ou au système de points par rapport au point O. Pour un solide de révolution, en rotation autour de son axe D, nous établirons que : où ID est le moment d'inertie du solide par rapport à l'axe D.
 égal à la variation du moment cinétique par unité de temps. Ce couple est le moment d une force appliquée à la particule ou au système de points par rapport au point O. Pour un solide de révolution, en rotation autour de son axe D, nous établirons que : où ID est le moment d inertie du solide par rapport à l axe D.")
14
Principe d'Action et de Réaction (3ème loi de Newton) :
Soit un système isolé de deux points matériels de masses respectives m1 et m2, le système étant isolé on a : soit : Dans un système isolé de deux points M1 et M2 , l'action de M1 sur M2 est opposée à l'action de M2 sur M1 . Si on appelle la réaction de M1 sur M2 alors :

15
Mouvement d’un projectile
Un projectile, placé dans le champ de la pesanteur terrestre , est lancé avec une vitesse initiale faisant un angle a avec l’horizontale. Nous décrivons le mouvement dans un plan vertical, en le décomposant suivant l’horizontale Ox et la verticale Oy. L’équation du mouvement rectiligne uniformément accéléré est : Les composantes de la vitesse initiale sur Ox et Oy sont : Il n’y a pas d’accélération dans la direction Ox : et sur Oy nous avons : En tirant t de X et en remplaçant dans Y on trouve c’est l’équation d’une parabole Portée : c’est la distance horizontale parcourue par le projectile. Si l’altitude de départ et d’arrivée est la même (Y = 0), le projectile atteint son but à l’instant t donné par : d’où la portée :
, le projectile atteint son but à l’instant t donné par : d’où la portée :")
16
q = 60° q = 30° q = 45° q

17
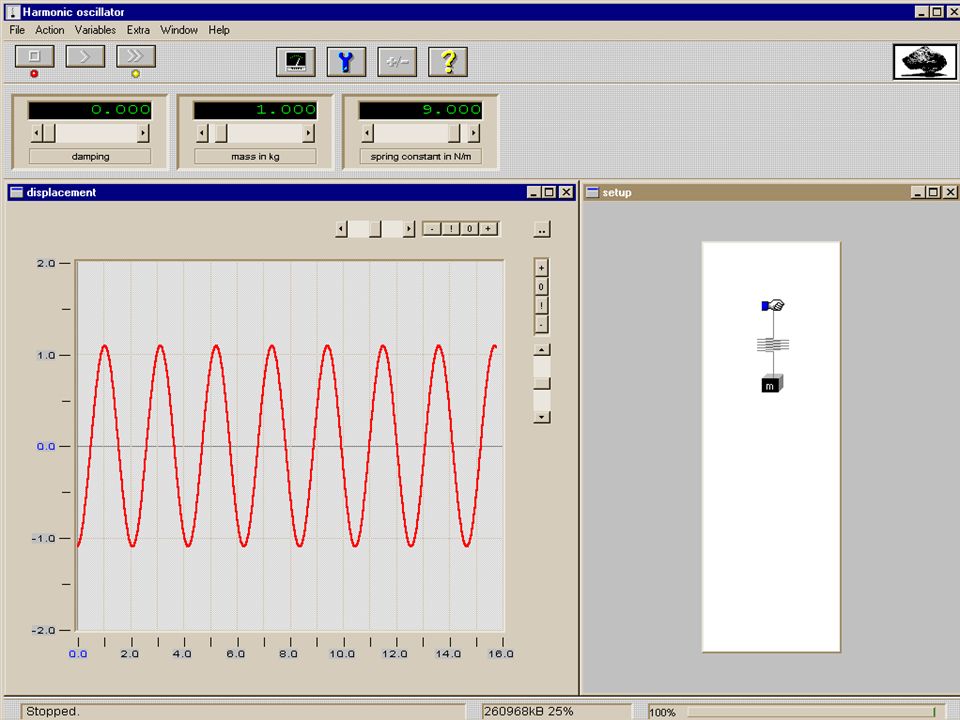
Oscillateur harmonique, force de rappel
Force de rappel linéaire : Exemple d’un ressort : oscillateur à une dimension où w est la pulsation, les solutions sont du type où A et B dépendent des conditions initiales, dans le cas particulier où la vitesse initiale est nulle, on a :

21
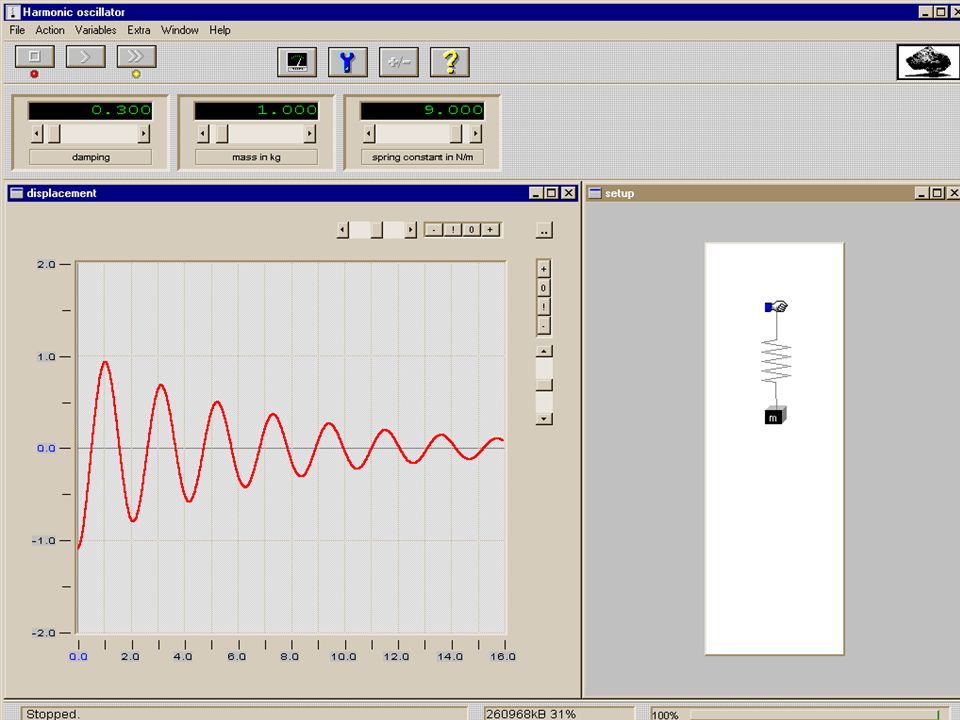
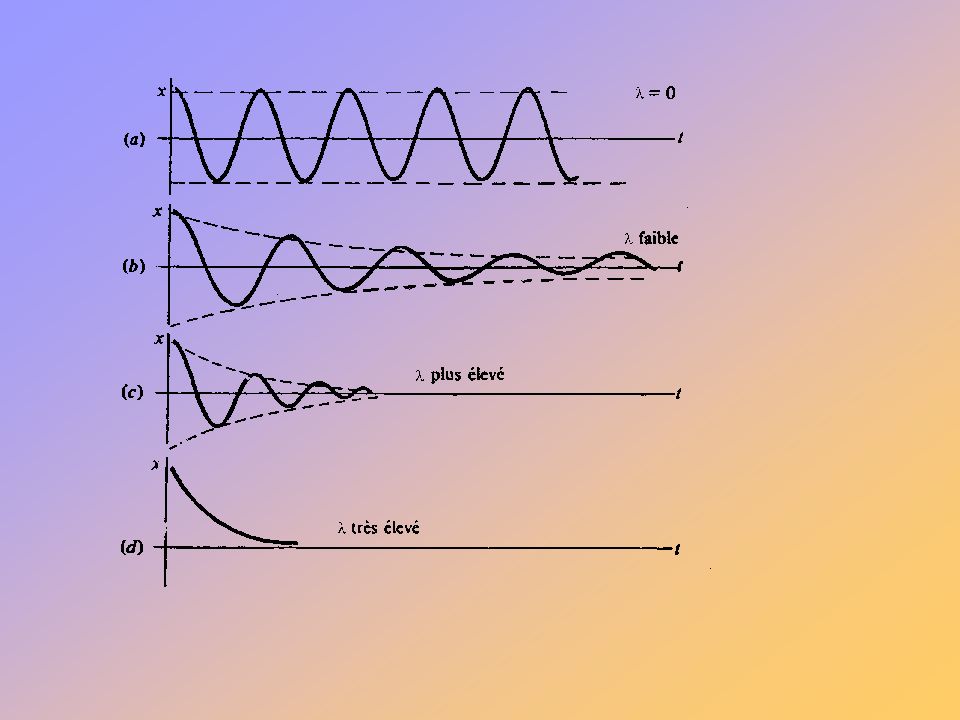
Dans la réalité tout système est soumis à des frottements (fluide ou solide) qui dissipent de l’énergie. Nous traitons l’exemple d’un oscillateur harmonique soumis à une force de frottement fluide proportionnelle à la vitesse du mobile où l est le coefficient de frottement. Soit un ressort de dureté k, fixe à une extrémité et portant une masse m à l’autre. L’équation du mouvement est alors : En posant on a : Les solutions de cette équation différentielle sont du type d’où l’équation caractéristique : dont les solutions sont : On distingue 3 cas : Seules les racines imaginaires conduisent à des oscillations, les racines réelles donnent lieu à des mouvements apériodiques. Pour chaque cas, les solutions générales sont des combinaisons linéaires des solutions. Nous ne traitons en détail que le cas des racines imaginaires.

22
Avec les deux racines imaginaires sont :
La solution générale est alors une combinaison linéaire de ces deux racines : En posant : Les termes entre parenthèses représentent un mouvement sinusoïdal, le facteur représente la décroissance exponentielle de l’amplitude des oscillations. W est la pseudo pulsation du mouvement sinusoïdal et la pseudo période T’ est : Le décrément logarithmique d relie le rapport des amplitudes A1(t) et A2(t+T) à la pseudo période et à l’amortissement l :
 et A2(t+T) à la pseudo période et à l’amortissement l :")
23
Analogie électrique : Soit un circuit électrique oscillant comportant une capacité C, une inductance L et une résistance R. les d.d.p. aux bornes de ces composants sont : Le circuit étant fermé, la somme des d.d.p. est nulle, soit : En comparant à l’oscillateur mécanique amorti : par analogie, la pulsation du circuit électrique est : nous pouvons dire que le rôle de l’inductance L est similaire à celui de la masse d’inertie m, la résistance R à celui du coefficient de frottement l et l’inverse de la capacité C (élastance) à celui de l’élasticité k du ressort.
 à celui de l’élasticité k du ressort.")
Présentations similaires











 Le solide indéformable>")
 Chaîne infinie doscillateurs couplés 1) Le modèle.>")








