Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
LE GPS Global positioning Systeme
Sources : Guide GPS VFR du SEFA Cépaduès p355 Internet

2
PLAN LE GPS Objectif Utilité Leçon Introduction Description
Fonctionnement Types de GPS Utilisation en VFR Questions

3
LE GPS Le GPS réalise un vieux rêve : celui de pouvoir se repérer dans le temps et l’espace ! Il permet d’améliorer la précision d’une navigation dégrossie à l’estime et diminuer la charge de travail par une bonne organisation des taches Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

4
LE GPS Comprendre son fonctionnement, connaître ses limitations
L’utiliser de manière optimale en évitant ses pièges Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

5
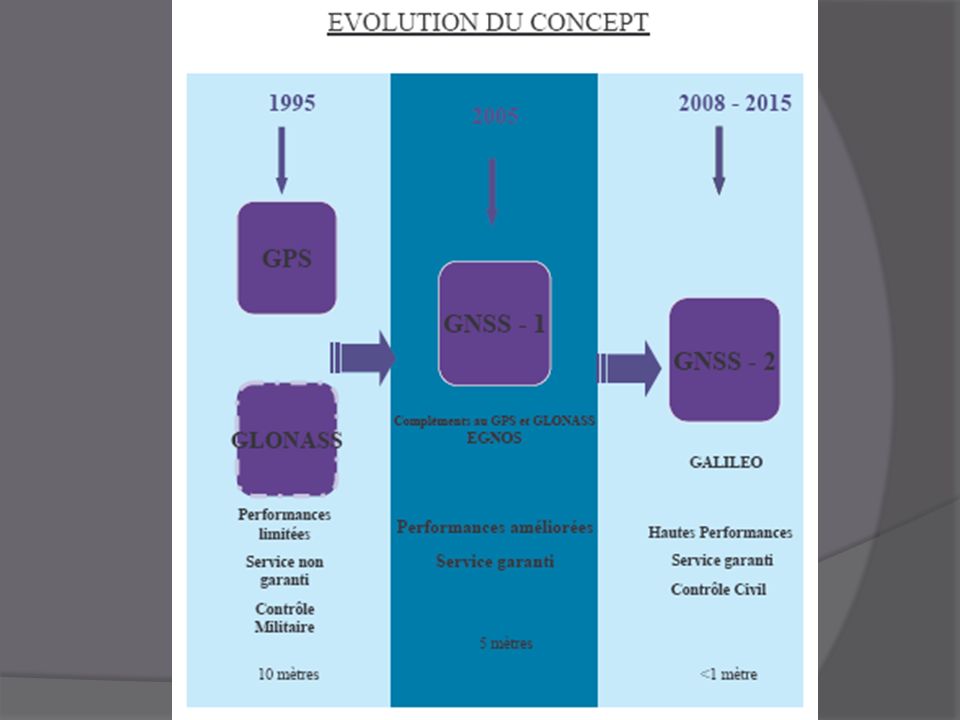
LE GPS Système militaire Américain NAV STAR-GPS (1995/2000)
Le G.N.S.S. Global Navigation Satellite System L’acronyme GNSS englobe l'ensemble des systèmes de navigation par satellite : Système militaire Américain NAV STAR-GPS (1995/2000) NAVigation System Time And Ranging- Global Positioning System Système Soviétique GLONASS (1995/2009) GLObal NAvigation Satellite System Système Européen (en création) GALILEO (2013) Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 NAVigation System Time And Ranging- Global Positioning System. Système Soviétique. GLONASS (1995/2009) GLObal NAvigation Satellite System. Système Européen (en création) GALILEO (2013) Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
6
LE GPS Le G.N.S.S. système mondial (OACI)
Un système GNSS doit satisfaire à certaines exigences : Infos de navigation en temps réel avec : Une disponibilité continue Un certain niveau de précision Assurer l'intégrité des informations fournies L’utilisateur doit pouvoir vérifier et/ou de s'assurer que la position affichée est bonne et sûre Garanties et responsabilités quant aux incidents éventuels de fonctionnement Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

8
LE GPS Le segment spatial Le segment de contrôle
Composition du système GPS : Trois éléments distincts : Le segment spatial Le segment de contrôle Le segment utilisateur Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

9
LE GPS Le segment spatial :
Le système utilise un réseau de 24 satellites Il existe 6 orbites de 4 satellites Chaque orbite fait un angle de 55° avec l’équateur La distance terre satellite est sensiblement de Km Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

10
LE GPS Le segment spatial :
Chaque satellite connaît sa position précise ainsi que l’heure grâce à une horloge atomique Il émet continuellement de manière omnidirectionnelle : Les almanachs (position constellation) Les éphémérides (position du satellite) L’heure corrigée d’envoi du message Paramètres de correction ionosphérique Des codes pour mesurer la distance L’état de santé du satellite Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 Les éphémérides (position du satellite) L’heure corrigée d’envoi du message. Paramètres de correction ionosphérique. Des codes pour mesurer la distance. L’état de santé du satellite. Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
11
LE GPS Le segment de contrôle :
5 stations de surveillance réparties autour de la terre pour : Suivre les satellites Calculer leur position (éphémérides) Recaler leurs horloges atomiques Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 Recaler leurs horloges atomiques. Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
12
LE GPS Le segment de contrôle :
5 stations de surveillance réparties autour de la terre pour : Suivre les satellites Calculer leur position (éphémérides) Recaler leurs horloges atomiques Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 Recaler leurs horloges atomiques. Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
13
LE GPS Le segment utilisateur : L’antenne de réception Le récepteur/calculateur GPS Une interface Ex : Le GPS 150 Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

14
LE GPS Le segment utilisateur : L’antenne de réception Le récepteur/calculateur GPS Une interface Ex : Le GNS 430 Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

15
LE GPS Le segment utilisateur : L’antenne de réception Le récepteur/calculateur GPS Une interface Ex : Le GNS 530 Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

16
LE GPS Le segment utilisateur : L’antenne de réception Le récepteur/calculateur GPS Une interface Ex : Le GNS 1000 Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

17
LE GPS Calcul de la position :
Il y a d’abord un calcul de distance entre plusieurs satellites et le récepteur Tps / c = D Ordre de grandeur de temps : D=21000 Km Tps? / = 0,07 s Quelle distance représente 1μs ? X = 300 m ! Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

18
LE GPS Calcul de la position : Le calcul pour un satellite nous donne une distance, on se trouve donc sur une sphère autour de celui-ci Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

19
LE GPS Calcul de la position : Idem avec un 2iéme satellite, on trouve alors à l’intersection des 2 sphères Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions 3000 Km

20
LE GPS Calcul de la position : Avec un 3iéme satellite on obtient un volume triangulaire « 3D » Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions 50 Km

21
LE GPS En faisant l’intersection avec la terre on obtient 1 point
Calcul de la position : En faisant l’intersection avec la terre on obtient 1 point Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

22
LE GPS En faisant l’intersection avec la terre on obtient 1 point
Calcul de la position : En faisant l’intersection avec la terre on obtient 1 point Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

23
LE GPS Calcul de la position : Petit problème :
tous nos calculs sont basés sur une heure très précise or si le satellite possède une horloge atomique recalée par les stations sol, ce n’est pas le cas de votre récepteur ! Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

24
LE GPS Calcul de la position : Mise à l’heure du récepteur : Objectif
On calcule son erreur : Si son horloge est en retard, le récepteur croira que les satellites sont plus loin donc les cercles seront plus grands Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

25
LE GPS Calcul de la position : Mise à l’heure du récepteur : Objectif
On calcule son erreur : Si son horloge est en avance, le récepteur croira que les satellites sont plus près donc les cercles seront plus petits Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

26
LE GPS Calcul de la position : Mise à l’heure du récepteur : Objectif
Il suffit d’avancer ou retarder l’horloge du récepteur jusqu’à ce que les cercles se coupent en 1 seul point Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

27
LE GPS Calcul de la position : Mise à l’heure du récepteur : Objectif
Pour affiner l’heure (sphères épaisses) on synchronise un code pseudo aléatoire généré par le satellite (connu du récepteur) Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 on synchronise un code pseudo aléatoire généré par le satellite (connu du récepteur) Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
28
LE GPS Calcul de la position : Mise à l’heure du récepteur : Objectif
Pour affiner l’heure (sphères épaisses) on synchronise un code pseudo aléatoire généré par le satellite (connu du récepteur) Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 on synchronise un code pseudo aléatoire généré par le satellite (connu du récepteur) Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
29
LE GPS Calcul de la position : En résumé, pour déterminer une position, combien y a-t-il d’inconnues ? X Y Z Et la 4ième dimension : T Il faut donc 4 équations donc 3 satellites + la terre (modélisée) Ou 4 satellites Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 Ou 4 satellites Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
30
LE GPS Calcul de la position : Modélisation de la terre Objectif
On a défini une référence ECEF (Earth-Centered, Earth-Fixed) Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
31
LE GPS Calcul de la position : Modélisation de la terre Objectif
Cette référence est une ellipsoïde qui suit plus ou moins la surface de la terre En Europe nous utilisons WGS 84 (World Geodesique System 1984) Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
32
LE GPS Calcul de la position : Modélisation de la terre Objectif
Il en résulte une erreur entre cette ellipsoïde et le niveau moyen des océans On l’appelle GUND (Geodoide UNDulation) L’altitude donnée par le GPS est donc par rapport cette ellipsoïde Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 L’altitude donnée par le GPS est donc par rapport cette ellipsoïde. Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
33
LE GPS Calcul de la position : Modélisation de la terre Objectif
L’ondulation du Géoïde est donnée sur les AIP En France elle est en moyenne de 150 Ft Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

34
LE GPS Les erreurs : le monde n’est pas parfait !
La précision est dépendante de : Milieu de propagation (ionosphère, troposphère, multi trajets, interférences) Dérives des horloges atomiques Erreur d’éphémérides Position du satellite sur l’orbite Dilution géométrique (écartement des satellites : GDOP ou DOP Dilution Of Precision Dégradation volontaire (S/A) fini en 2000 Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions 22 m Depuis 2000
 Dérives des horloges atomiques. Erreur d’éphémérides. Position du satellite sur l’orbite. Dilution géométrique (écartement des satellites : GDOP ou DOP Dilution Of Precision. Dégradation volontaire (S/A) fini en Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions. 22 m. Depuis")
35
LE GPS Les erreurs : le monde n’est pas parfait ! La précision est dépendante de : Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

36
LE GPS Les erreurs : le monde n’est pas parfait ! Il faut aussi recevoir un nombre suffisant de satellites (qui fonctionnent) Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

37
LE GPS Correction des erreurs : Revenons sur le schéma GNSS Objectif
Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

38
LE GPS Correction des erreurs : Objectif Utilité Leçon Questions
GBAS (Ground Base Augmentation System) Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
39
LE GPS Correction des erreurs : Objectif Utilité Leçon Questions
GBAS (Ground Base Augmentation System) Autrement appelé le D GPS Une station (phare, balise…) qui connaît sa position précise, la compare avec sa position GPS et envoie une correction Limitation : plus on s’éloigne de la station, moins c’est précis Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 Autrement appelé le D GPS. Une station (phare, balise…) qui connaît sa position précise, la compare avec sa position GPS et envoie une correction. Limitation : plus on s’éloigne de la station, moins c’est précis. Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
40
LE GPS Correction des erreurs : Objectif Utilité Leçon Questions
GBAS (Ground Base Augmentation System) En équipant les aérodromes, on arrive à une très grande précision qui permettra même de faire des finales de précision GBAS CAT I (2010), GBAS CAT II et III (2012) Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 En équipant les aérodromes, on arrive à une très grande précision qui permettra même de faire des finales de précision. GBAS CAT I (2010), GBAS CAT II et III (2012) Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
41
LE GPS Correction des erreurs : Objectif Utilité Leçon Questions
GBAS (Ground Base Augmentation System) GBAS CAT I (2010), GBAS CAT II et III (2012) Avec la possibilité de choisir des plans et des axes différents (voire courbes) Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 GBAS CAT I (2010), GBAS CAT II et III (2012) Avec la possibilité de choisir des plans et des axes différents (voire courbes) Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
42
LE GPS Correction des erreurs : Objectif Utilité Leçon Questions
GBAS (Ground Base Augmentation System) GBAS CAT I (2010), GBAS CAT II et III (2012) De même pour les départs Les avions doivent être équipé GBAS CAT I Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 GBAS CAT I (2010), GBAS CAT II et III (2012) De même pour les départs. Les avions doivent être équipé GBAS CAT I. Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
43
LE GPS Correction des erreurs : Objectif Utilité Leçon Questions
SBAS (Satellite Base Augmentation System) Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
44
LE GPS Correction des erreurs : Objectif Utilité Leçon Questions
SBAS (Satellite Base Augmentation System) Il est composé de : Stations sol (40 pour EGNOS) Satellites (2 pour EGNOS) Il permet de : Corriger la position (suivant le principe du DGPS) la précision passe de 20m à 2m Renseigner en temps réel les utilisateurs de GPS sur la qualité de signaux reçu Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 Il est composé de : Stations sol (40 pour EGNOS) Satellites (2 pour EGNOS) Il permet de : Corriger la position (suivant le principe du DGPS) la précision passe de 20m à 2m. Renseigner en temps réel les utilisateurs de GPS sur la qualité de signaux reçu. Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
45
Les différents systèmes à travers le monde
LE GPS Correction des erreurs : SBAS (Satellite Base Augmentation System) Les différents systèmes à travers le monde Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 Les différents systèmes à travers le monde. Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
46
LE GPS Correction des erreurs : Objectif Utilité Leçon Questions
ABAS (Aircraft Base Augmentation System) Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
47
LE GPS Correction des erreurs :
ABAS (Aircraft Base Augmentation System) Intégrité du système : Le système fourni une alarme au pilote lorsque la navigation n’a plus la précision requise Elle est faite à bord de l'aéronef par l'équipement lui même RAIM (Receiver Anonymous Integrity Monitoring) Pour cela on a besoin de 5 satellites suffisamment espacés (ce qui n’est pas le cas 100% du temps) Certains récepteurs utilisent aussi des moyens radio nav Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 Intégrité du système : Le système fourni une alarme au pilote lorsque la navigation n’a plus la précision requise. Elle est faite à bord de l aéronef par l équipement lui même RAIM (Receiver Anonymous Integrity Monitoring) Pour cela on a besoin de 5 satellites suffisamment espacés (ce qui n’est pas le cas 100% du temps) Certains récepteurs utilisent aussi des moyens radio nav. Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
48
LE GPS Correction des erreurs : En résumé Objectif Utilité Leçon
Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

49
N’oubliez pas la vue est aussi un moyen !
LE GPS Correction des erreurs : N’oubliez pas la vue est aussi un moyen ! Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

50
« GPS utilisable en VFR de jour et en vue du sol uniquement »
LE GPS Différentes classes de GPS homologués : Les GPS portables : Utilisation pour le suivi de la navigation fortement déconseillée Aucune homologation, donc sous l’entière responsabilité du pilote Attention, l’antenne est amplifiée, donc rayonnement magnétique qui peut perturber le compas et les instruments de radio navigation Les GPS intégrés non RAIM : Homologués (DCS), mais ne peuvent pas être utilisés comme moyen primaire de navigation Une étiquette sur le tableau de bord « GPS utilisable en VFR de jour et en vue du sol uniquement » Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
, mais ne peuvent pas être utilisés comme moyen primaire de navigation. Une étiquette sur le tableau de bord. « GPS utilisable en VFR de jour et en vue du sol uniquement » Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
51
LE GPS Différentes classes de GPS homologués : Les classes A ont :
La partie calcul de navigation en plus de la partie réception GPS La fonction RAIM Les classes B : Classe A + envoie des informations vers un système de navigation Des sous classes qui ont une fonction intégrée RAIM autonome (vérification avec des VOR…) Les classes C : Classe B mais peuvent êtres couplés à un pilote automatique Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 Les classes C : Classe B mais peuvent êtres couplés à un pilote automatique. Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
52
LE GPS Conditions d’utilisation en VFR :
Seuls les GPS homologués qui disposent de la fonction RAIM peuvent êtres utilisés comme moyen primaire de navigation pour les vols VFR (à défaut VOR ou R/C) : De jour pour les survols de l'eau, de régions inhabitées Sans visuel du sol En VFR de nuit… En cas de perte de l’intégrité, le vol peut être poursuivi à l’estime en vérifiant la route dès que possible Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 : De jour pour les survols de l eau, de régions inhabitées. Sans visuel du sol. En VFR de nuit… En cas de perte de l’intégrité, le vol peut être poursuivi à l’estime en vérifiant la route dès que possible. Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
53
LE GPS Conditions d’utilisation en VFR :
Le GPS ne peut pas être utilisé pour l ’altitude à cause de son imprécision (500 Ft) et de la GUND (150 Ft) La base de données doit être mise à jour tous les 28 jours Toutefois il est admis en VFR que cette base de données soit mise à jour tous les 3 ans Dans ce cas il est important de privilégier la vérification des informations par une documentation à jour Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 et de la GUND (150 Ft) La base de données doit être mise à jour tous les 28 jours. Toutefois il est admis en VFR que cette base de données soit mise à jour tous les 3 ans. Dans ce cas il est important de privilégier la vérification des informations par une documentation à jour. Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
54
LE GPS Conditions d’utilisation en VFR :
Il faut aussi savoir s’en servir Étudier le manuel S’entraîner avec un simulateur Faire une instruction et s’entrainer en vol Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

55
LE GPS 2 types d’utilisation : Utilisation Basique Objectif Utilité
Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

56
LE GPS 2 types d’utilisation : Utilisation Basique
Appuyer sur la touche GOTO Choisir un point dans la base de données Appuyer sur ENT Idem avec NEAREST Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

57
LE GPS 2 types d’utilisation : Utilisation Basique
Visualisation de la trajectoire En mode MAP Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

58
LE GPS 2 types d’utilisation : Utilisation Basique
Visualisation de la trajectoire En mode ARC (avec fond de carte et zones) Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
59
Attention cette méthode monopolise beaucoup l’attention du pilote !
LE GPS Utilisation basique : Attention cette méthode monopolise beaucoup l’attention du pilote ! Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions PILOTER SON AVION ET REGARDER sa trajectoire !!!

60
ATTENTION ERREUR DE SAISIE
LE GPS 2 types d’utilisation : Utilisation Avancée Définir des points tournants non existants dans la base de données Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions A EVITER EN VOL ATTENTION ERREUR DE SAISIE

61
LE GPS 2 types d’utilisation : Utilisation Avancée
Créer un plan de vol (FPL) Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
62
LE GPS 2 types d’utilisation : Utilisation Avancée
Créer un plan de vol (FPL) Visualisation après activation Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions CETTE UTILISATION NECESSITE DE CONNAÎTRE SON GPS D’AVANTAGE DE PREPARATION AU SOL MOINS DE MANIPULATION EN VOL
 Visualisation après activation. Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions. CETTE UTILISATION NECESSITE DE CONNAÎTRE SON GPS. D’AVANTAGE DE PREPARATION AU SOL. MOINS DE MANIPULATION EN VOL.")
63
LE GPS Préparation long terme :
Le GPS ne remplace pas une bonne préparation de la navigation à long terme En plus de la préparation standard, se renseigner sur le type de GPS GPS RAIM, il est préférable de prendre un repère identifiable à vue toutes les 30 min GPS non RAIM, il doit y avoir un repère au minimum toutes les 30 min Si les points tournants ne sont pas des balises ou des terrains, il faut relever les coordonnées géographique (ou relèvement / distance) Les points tournants doivent être facilement identifiables (vue ou Rnav) Prévoir une route beau temps et une route mauvais temps Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 Les points tournants doivent être facilement identifiables (vue ou Rnav) Prévoir une route beau temps et une route mauvais temps. Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
64
LE GPS Préparation court terme : Objectif Utilité Leçon Questions
Le GPS ne remplace pas une bonne préparation à court terme, en plus il faut : NOTAM GPS et Prédiction RAIM Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

65
LE GPS Préparation court terme : Objectif Utilité Leçon Questions
Le GPS ne remplace pas une bonne préparation à court terme, en plus il faut : NOTAM GPS et Prédiction RAIM Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

66
LE GPS Préparation court terme : Objectif Utilité Leçon Questions
Le GPS ne remplace pas une bonne préparation à court terme, en plus il faut : NOTAM GPS et Prédiction RAIM Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

67
LE GPS Préparation court terme : Objectif Utilité Leçon Questions
Le GPS ne remplace pas une bonne préparation à court terme, en plus il faut : NOTAM GPS et Prédiction RAIM Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

68
LE GPS Préparation court terme : Objectif Utilité Leçon Questions
Le GPS ne remplace pas une bonne préparation à court terme, en plus il faut : NOTAM GPS et Prédiction RAIM Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

69
LE GPS Conduite du vol : Au sol Objectif Utilité Leçon Questions
Vérifier la base de données Effacer les points précédents Saisir les points Créer le ou les FPL Vérifier la totalité de l’itinéraire et la distance totale (mode MAP, changer l’échelle) Utilisation de la fonction GOTO ou activation du FPL (au point d’arrêt) Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 Utilisation de la fonction GOTO ou activation du FPL (au point d’arrêt) Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
70
Gestion au point tournant
LE GPS Conduite du vol : En vol Gestion au point tournant Top Cap Altitude Estimée Radio Radionav / GPS Moteur Essence Directionnel Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

71
LE GPS Conduite du vol : En vol Évitement météo Objectif Utilité Leçon
Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

72
LE GPS Conduite du vol : En vol Évitement météo Objectif Utilité Leçon
Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

73
Dégagement / Déroutement
LE GPS Conduite du vol : En vol Dégagement / Déroutement La fonction « nearest » peut vous aider pour le choix du terrain (distance/relèvement), mais la décision ne sera prise qu’après étude de la carte Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
, mais la décision ne sera prise qu’après étude de la carte. Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
74
Dégagement / Déroutement
LE GPS Conduite du vol : En vol Dégagement / Déroutement Même avec un GPS, il faut : Gestion carburant Top Carte VAC Radio, radionav Calcul du TOD … Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

75
Gestion aux points tournants
LE GPS Conduite du vol : En vol Gestion aux points tournants Même méthode que sans GPS : Top Cap Altitude Estimée Radio / Radio nav GPS … Le GPS ne dispense pas de la tenue du Log Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

76
LE GPS Conduite du vol : En vol Arrivée sur un terrain
Dès que possible passer en trajectoire à vue pour favoriser l’anti abordage Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

77
LE GPS Conduite du vol : En vol Limitations Objectif Utilité Leçon
La constellation DOP (proche de 1 plus précis) EPE Estimated Position Error Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 EPE Estimated Position Error. Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
78
LE GPS Conduite du vol : En vol Limitations Objectif Utilité Leçon
Perte de la fonction RAIM Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

79
LE GPS REGLES D’OR : Une bonne préparation du vol minimise les saisies et les manipulations en vols Le GPS ne remplace pas la conduite et le suivi classique du vol Le GPS est un système confortable qui peut tomber en panne Si tout le suivi de la navigation reposait sur le GPS, la situation peut se dégrader très rapidement (panne électrique…) Il est recommandé de s’entraîner régulièrement avec et sans GPS Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions
 Il est recommandé de s’entraîner régulièrement avec et sans GPS. Objectif. Utilité. Leçon. Introduction. Description. Fonctionnement. Types de GPS. Utilisation VFR. Questions.")
80
LE GPS REGLES D’OR : Le « pianotage » prolongé du GPS en vol consomme beaucoup de ressources Le suivi d’une navigation avec la carte permet de vérifier la cohérence des informations venant du GPS et incite le pilote à appliquer la règle « voir et éviter » Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

81
LE GPS Utilisation du GPS en VFR : Exemple d’évènement
Les conditions météo obligent le pilote à des variations de trajectoires. il est confronté a un vent fort. Le pilote est contraint d’atterrir en campagne à la suite d’une panne d’essence. La jauge était masquée par le récepteur GPS Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

82
Attention en pianotant sur le GPS Ne pas tout baser sur le GPS
SECURITE Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions Attention en pianotant sur le GPS Ne pas tout baser sur le GPS

83
LE GPS Quelques questions…..
Dans quels cas le GPS peut-il être utilisé comme moyen primaire de navigation? Lorsqu’il est homologué en classe A, B ou C L’altitude donnée par le GPS peut-elle être comparée à l’altitude lue à l'altimètre? L’altitude donnée par le GPS doit être corrigée de la valeur GUND L’emploi d’un GPS permet-il de se passer du log de navigation? Non Objectif Utilité Leçon Introduction Description Fonctionnement Types de GPS Utilisation VFR Questions

84
QUESTIONS ? LE GPS Objectif Utilité Leçon Questions Introduction
Description Fonctionnement Types de GPS Utilisation VFR Questions QUESTIONS ?

Présentations similaires


. Nous étudierons>")













>")


